



擊聯系(xì)吴工")

赛靈思(sī)公司汽車系(xì)統架構师(shī)和(hé)駕駛輔助專家(jiā)Paul Zoratti表(biǎo)示:“汽車生(shēng)産商在(zài)汽車中(zhōng)集成(chéng)的(de)駕駛輔助系(xì)統可(kě)以(yǐ)幫助司機(jī)做得更(gèng)好(hǎo)。駕駛輔助系(xì)統能(néng)够以(yǐ)報警等形式为(wèi)司機(jī)提(tí)供多(duō)種(zhǒng)信(xìn)息,幫助司機(jī)在(zài)任何情(qíng)況下(xià)做出(chū)更(gèng)準确的(de)選擇,從而(ér)使駕駛更(gèng)安(ān)全(quán)。”
得益于(yú)電(diàn)子技術(shù)的(de)發(fà)展(zhǎn)以(yǐ)及(jí)OEM廠(chǎng)商在(zài)此(cǐ)基礎上(shàng)的(de)創新,駕駛輔助系(xì)統的(de)能(néng)力相當強(qiáng)大,而(ér)未来(lái)的(de)潛力更(gèng)是(shì)令人(rén)驚叹(tàn)。
關(guān)注汽車電(diàn)子行業的(de)Semicast公司首席(xí)分(fēn)析师(shī)Colin Barnden認为(wèi),汽車生(shēng)産商和(hé)一(yī)級供貨商以(yǐ)及(jí)研究人(rén)員对(duì)駕駛輔助系(xì)統的(de)研究已有(yǒu)幾(jǐ)十(shí)年(nián)的(de)时(shí)間(jiān),但只(zhī)是(shì)在(zài)过(guò)去(qù)的(de)10年(nián)多(duō)时(shí)間(jiān)里(lǐ),電(diàn)子系(xì)統和(hé)設計(jì)技術(shù)才發(fà)展(zhǎn)到(dào)足够高(gāo)的(de)水(shuǐ)平,OEM廠(chǎng)商才欣然接受并将其配置于(yú)汽車內(nèi)。Barnden表(biǎo)示:“駕駛輔助系(xì)統在(zài)如(rú)此(cǐ)短(duǎn)的(de)时(shí)間(jiān)里(lǐ)取(qǔ)得如(rú)此(cǐ)大的(de)發(fà)展(zhǎn)确实令人(rén)感(gǎn)到(dào)驚奇。”
目前(qián),OEM廠(chǎng)商及(jí)其供應(yìng)商,甚至(zhì)零(líng)配件(jiàn)電(diàn)子控制單元(yuán)(ECU)制造商都正(zhèng)在(zài)提(tí)供及(jí)設計(jì)多(duō)種(zhǒng)駕駛輔助系(xì)統(見(jiàn)图(tú)1)。駕駛輔助系(xì)統可(kě)以(yǐ)幫助司機(jī)更(gèng)快(kuài)更(gèng)好(hǎo)地(dì)停車,與(yǔ)前(qián)車保持(chí)安(ān)全(quán)距離,還(huán)可(kě)以(yǐ)通(tòng)知司機(jī)他(tā)们(men)此(cǐ)前(qián)可(kě)能(néng)无法看(kàn)到(dào)的(de)危险,并幫助他(tā)们(men)安(ān)全(quán)地(dì)更(gèng)換車道(dào)。
 ?
?许多(duō)此(cǐ)類(lèi)系(xì)統在(zài)幾(jǐ)年(nián)前(qián)出(chū)現(xiàn)时(shí)還(huán)都是(shì)相當簡單的(de)技術(shù)。但OEM廠(chǎng)商很快(kuài)就(jiù)發(fà)展(zhǎn)出(chū)更(gèng)複雜的(de)系(xì)統,而(ér)現(xiàn)在(zài)又在(zài)将这(zhè)些系(xì)統集成(chéng)为(wèi)“傳感(gǎn)器融合技術(shù)”,即融合多(duō)種(zhǒng)駕駛輔助系(xì)統,每个(gè)系(xì)統独立工作,但都使用(yòng)源于(yú)相同(tóng)的(de)共(gòng)享傳感(gǎn)器的(de)輸出(chū)。这(zhè)樣(yàng)就(jiù)可(kě)以(yǐ)为(wèi)司機(jī)提(tí)供更(gèng)精确的(de)周邊(biān)环(huán)境信(xìn)息,幫助他(tā)们(men)做出(chū)更(gèng)準确的(de)決定(dìng),并提(tí)供更(gèng)安(ān)全(quán)更(gèng)豐富的(de)駕駛體(tǐ)验(yàn)。要(yào)实現(xiàn)这(zhè)些,就(jiù)需要(yào)更(gèng)強(qiáng)大的(de)高(gāo)級計(jì)算技術(shù)。这(zhè)也(yě)是(shì)FPGA平台(tái)可(kě)以(yǐ)大展(zhǎn)身(shēn)手(shǒu)的(de)地(dì)方(fāng)。
停車系(xì)統的(de)快(kuài)速演化(huà)
大約10年(nián)前(qián),OEM廠(chǎng)商推出(chū)了(le)第(dì)一(yī)代(dài)輔助駕駛系(xì)統——倒車輔助系(xì)統。倒車輔助系(xì)統包(bāo)括安(ān)裝(zhuāng)在(zài)車尾的(de)一(yī)系(xì)列傳感(gǎn)器,可(kě)通(tòng)过(guò)超聲波(bō)或(huò)雷(léi)达(dá)信(xìn)号(hào)测量(liàng)與(yǔ)車後(hòu)物(wù)體(tǐ)的(de)距離。在(zài)司機(jī)倒車时(shí),傳感(gǎn)器通(tòng)常会(huì)發(fà)出(chū)“哔哔”的(de)提(tí)醒聲,且提(tí)醒聲的(de)頻率会(huì)随着汽車離障礙物(wù)距離的(de)縮短(duǎn)而(ér)增加。當汽車離障礙物(wù)的(de)距離小于(yú)四(sì)英寸(cùn)时(shí),提(tí)醒聲会(huì)變(biàn)成(chéng)固定(dìng)音(yīn)調的(de)報警音(yīn)。
Barnden表(biǎo)示:“这(zhè)一(yī)功能(néng)非(fēi)常有(yǒu)用(yòng),特(tè)别是(shì)當駕駛大型車輛(如(rú)载貨車)的(de)时(shí)候。但这(zhè)只(zhī)是(shì)最(zuì)基本(běn)的(de)系(xì)統,实際上(shàng)并沒(méi)有(yǒu)集成(chéng)智能(néng)功能(néng),所(suǒ)有(yǒu)工作和(hé)判斷仍然必須由(yóu)司機(jī)完成(chéng)。當汽車靠近(jìn)其他(tā)物(wù)體(tǐ)时(shí),系(xì)統会(huì)發(fà)出(chū)警報,但最(zuì)終(zhōng)還(huán)得由(yóu)司機(jī)決定(dìng)是(shì)繼續倒車還(huán)是(shì)停下(xià)来(lái)。”
倒車輔助系(xì)統是(shì)部(bù)署(shǔ)最(zuì)廣泛的(de)系(xì)統,也(yě)是(shì)OEM供貨批量(liàng)最(zuì)大的(de)駕駛輔助系(xì)統。2007年(nián),汽車生(shēng)産商在(zài)歐洲生(shēng)産的(de)500万(wàn)輛汽車中(zhōng)以(yǐ)及(jí)在(zài)美國(guó)生(shēng)産的(de)200万(wàn)輛汽車中(zhōng)均安(ān)裝(zhuāng)了(le)倒車輔助系(xì)統,全(quán)球的(de)總(zǒng)安(ān)裝(zhuāng)量(liàng)約为(wèi)1000万(wàn)。也(yě)就(jiù)是(shì)说(shuō),2007年(nián)生(shēng)産的(de)汽車中(zhōng)大約6輛車中(zhōng)有(yǒu)1輛安(ān)裝(zhuāng)了(le)倒車輔助系(xì)統。“我(wǒ)預計(jì)这(zhè)一(yī)數字(zì)在(zài)所(suǒ)有(yǒu)地(dì)區(qū)還(huán)会(huì)進(jìn)一(yī)步增长,因(yīn)为(wèi)这(zhè)一(yī)功能(néng)既有(yǒu)用(yòng)又簡單,并且還(huán)不(bù)貴。”Barnden说(shuō)。
OEM廠(chǎng)商将这(zhè)一(yī)技術(shù)向(xiàng)前(qián)推進(jìn)了(le)一(yī)步,增加了(le)智能(néng)系(xì)統從而(ér)創造出(chū)被(bèi)稱为(wèi)停車輔助(Park Assist)的(de)新駕駛輔助系(xì)統。安(ān)裝(zhuāng)在(zài)汽車後(hòu)号(hào)牌(pái)附近(jìn)的(de)攝像头(tóu)可(kě)連(lián)接至(zhì)司機(jī)座位前(qián)面(miàn)的(de)導航顯示系(xì)統,倒車时(shí),導航系(xì)統会(huì)自(zì)動(dòng)激活攝像头(tóu),这(zhè)樣(yàng)司機(jī)就(jiù)能(néng)看(kàn)到(dào)汽車距離後(hòu)面(miàn)的(de)物(wù)體(tǐ)到(dào)底有(yǒu)多(duō)近(jìn)。有(yǒu)些系(xì)統還(huán)能(néng)進(jìn)行一(yī)些基本(běn)的(de)图(tú)像識别,并在(zài)屏幕上(shàng)顯示一(yī)些可(kě)視線(xiàn)索,这(zhè)樣(yàng)司機(jī)就(jiù)可(kě)以(yǐ)獲得應(yìng)該何时(shí)打(dǎ)轮等信(xìn)息。
Barnden指出(chū),奔驰和(hé)寶(bǎo)马等OEM廠(chǎng)商在(zài)5年(nián)前(qián)就(jiù)開(kāi)始在(zài)其最(zuì)高(gāo)端的(de)車型中(zhōng)提(tí)供停車輔助系(xì)統。現(xiàn)在(zài),这(zhè)一(yī)技術(shù)更(gèng)多(duō)地(dì)出(chū)現(xiàn)在(zài)更(gèng)为(wèi)主(zhǔ)流的(de)車型中(zhōng),特(tè)别是(shì) SUV,因(yīn)为(wèi)司機(jī)很難通(tòng)过(guò)向(xiàng)背後(hòu)看(kàn)或(huò)從後(hòu)視鏡(jìng)中(zhōng)确定(dìng)車後(hòu)的(de)障礙。Barnden表(biǎo)示,2007年(nián)售出(chū)的(de)汽車中(zhōng)配有(yǒu)停車輔助系(xì)統的(de)共(gòng)有(yǒu)100万(wàn)輛。
下(xià)一(yī)代(dài)系(xì)統則是(shì)自(zì)動(dòng)停車,淩志(Lexus)汽車在(zài)幾(jǐ)年(nián)前(qián)就(jiù)率先(xiān)在(zài)其LS系(xì)列豪華車型中(zhōng)安(ān)裝(zhuāng)了(le)自(zì)動(dòng)停車系(xì)統。
在(zài)自(zì)動(dòng)停車系(xì)統中(zhōng),幾(jǐ)个(gè)近(jìn)身(shēn)傳感(gǎn)器(包(bāo)括超聲波(bō)傳感(gǎn)器和(hé)攝像头(tóu))遍(biàn)布(bù)車身(shēn)周圍。當司機(jī)倒車时(shí),系(xì)統会(huì)檢查本(běn)車與(yǔ)其它(tā)停放(fàng)車輛之間(jiān)的(de)距離,并報告空間(jiān)是(shì)否足够。实際上(shàng),系(xì)統還(huán)可(kě)以(yǐ)做更(gèng)多(duō)工作。根(gēn)據(jù)司機(jī)的(de)最(zuì)終(zhōng)判斷和(hé)确定(dìng)的(de)方(fāng)向(xiàng),自(zì)動(dòng)停車系(xì)統会(huì)完成(chéng)剩下(xià)的(de)所(suǒ)有(yǒu)任务,自(zì)動(dòng)将車停放(fàng)好(hǎo)。
Barnden表(biǎo)示:“司機(jī)只(zhī)需按動(dòng)一(yī)个(gè)按鍵,汽車就(jiù)会(huì)自(zì)動(dòng)停好(hǎo),这(zhè)确实令人(rén)着迷。也(yě)许你認为(wèi)能(néng)够自(zì)動(dòng)停車的(de)汽車是(shì)20或(huò)25年(nián)以(yǐ)後(hòu)的(de)事(shì)情(qíng),但今天(tiān)的(de) OEM廠(chǎng)商就(jiù)已經(jīng)做到(dào)了(le)。”
停車輔助系(xì)統能(néng)够全(quán)方(fāng)位地(dì)对(duì)車身(shēn)周圍進(jìn)行测量(liàng),并迅速計(jì)算每一(yī)邊(biān)與(yǔ)其它(tā)物(wù)體(tǐ)的(de)距離。“这(zhè)个(gè)系(xì)統能(néng)够了(le)解(jiě)停車时(shí)的(de)操作步驟,是(shì)因(yīn)为(wèi)設計(jì)师(shī)已經(jīng)将停車算法編程入(rù)系(xì)統中(zhōng)。因(yīn)此(cǐ),系(xì)統知道(dào)應(yìng)當向(xiàng)哪个(gè)方(fāng)向(xiàng)打(dǎ)轮,相对(duì)于(yú)後(hòu)面(miàn)的(de)車輛應(yìng)當如(rú)何向(xiàng)前(qián)移動(dòng),以(yǐ)及(jí)停車所(suǒ)需的(de)所(suǒ)有(yǒu)參數。”Barnden補充道(dào)。
在(zài)这(zhè)方(fāng)面(miàn),日(rì)本(běn)的(de)OEM廠(chǎng)商比世界其它(tā)地(dì)方(fāng)提(tí)前(qián)3到(dào)5年(nián),但歐洲的(de)汽車生(shēng)産商也(yě)已開(kāi)始采用(yòng)停車輔助系(xì)統。“这(zhè)一(yī)功能(néng)在(zài)美國(guó)并不(bù)普遍(biàn),但毫(háo)无疑問(wèn),它(tā)最(zuì)終(zhōng)也(yě)会(huì)流行起来(lái)。”Barnden表(biǎo)示。最(zuì)初應(yìng)用(yòng)于(yú)高(gāo)端汽車的(de)停車輔助系(xì)統正(zhèng)逐漸應(yìng)用(yòng)于(yú)較小的(de)日(rì)本(běn)和(hé)歐洲汽車,并且在(zài)城市(shì)中(zhōng)非(fēi)常流行,因(yīn)为(wèi)大城市(shì)中(zhōng)很難尋找(zhǎo)到(dào)宽(kuān)敞的(de)停車空間(jiān)。
Barnden認为(wèi):“更(gèng)令人(rén)驚奇的(de)是(shì),停車輔助系(xì)統非(fēi)常可(kě)靠,并且特(tè)别精确,这(zhè)令人(rén)難以(yǐ)置信(xìn)。”随着这(zhè)一(yī)技術(shù)越来(lái)越常見(jiàn),司機(jī)很可(kě)能(néng)将会(huì)越来(lái)越相信(xìn)停車輔助系(xì)統要(yào)比自(zì)己停車更(gèng)好(hǎo)。
Barnden解(jiě)釋道(dào):“如(rú)果(guǒ)交給(gěi)計(jì)算機(jī)一(yī)項相对(duì)独立的(de)任务,那(nà)麼(me)計(jì)算機(jī)通(tòng)常做得比人(rén)要(yào)好(hǎo)。” 然而(ér),駕駛輔助系(xì)統的(de)關(guān)鍵特(tè)點(diǎn)之一(yī)是(shì)司機(jī)在(zài)控制汽車方(fāng)面(miàn)具有(yǒu)最(zuì)終(zhōng)決定(dìng)權,具有(yǒu)比自(zì)動(dòng)系(xì)統更(gèng)高(gāo)的(de)优先(xiān)控制權。?
汽車巡航控制的(de)快(kuài)速演化(huà)
过(guò)去(qù)10年(nián)时(shí)間(jiān)里(lǐ),駕駛輔助應(yìng)用(yòng)中(zhōng)快(kuài)速發(fà)展(zhǎn)的(de)另(lìng)一(yī)个(gè)領域是(shì)汽車巡航控制。
OEM廠(chǎng)商提(tí)供标(biāo)準巡航控制功能(néng)已經(jīng)有(yǒu)幾(jǐ)十(shí)年(nián)的(de)时(shí)間(jiān),但这(zhè)些系(xì)統并不(bù)具備智能(néng)性(xìng)。在(zài)傳統的(de)汽車巡航控制方(fāng)式下(xià),用(yòng)戶可(kě)通(tòng)过(guò)按鍵設定(dìng)汽車的(de)速度(dù)。但是(shì),如(rú)果(guǒ)司機(jī)不(bù)够專注,汽車就(jiù)将保持(chí)这(zhè)一(yī)速度(dù),從而(ér)有(yǒu)可(kě)能(néng)駛向(xiàng)路(lù)邊(biān)或(huò)直(zhí)接撞向(xiàng)前(qián)面(miàn)的(de)車輛或(huò)物(wù)體(tǐ)。
大約8年(nián)前(qián),奔驰開(kāi)始在(zài)其S級汽車中(zhōng)安(ān)裝(zhuāng)被(bèi)稱为(wèi)自(zì)動(dòng)巡航控制的(de)智能(néng)駕駛輔助系(xì)統,利用(yòng)前(qián)向(xiàng)雷(léi)达(dá)来(lái)测量(liàng)與(yǔ)前(qián)車之間(jiān)的(de)距離。司機(jī)按下(xià)按鈕,選擇他(tā)们(men)希望與(yǔ)前(qián)車保持(chí)2秒(miǎo)、3秒(miǎo)或(huò)更(gèng)长时(shí)間(jiān)的(de)行車間(jiān)距(headway),然後(hòu),系(xì)統会(huì)自(zì)動(dòng)調节(jié)速度(dù),以(yǐ)保持(chí)指定(dìng)的(de)行車間(jiān)距。
Barnden表(biǎo)示最(zuì)近(jìn)推出(chū)的(de)第(dì)二(èr)代(dài)自(zì)動(dòng)巡航控制系(xì)統实際上(shàng)還(huán)可(kě)以(yǐ)控制制動(dòng)。“如(rú)果(guǒ)前(qián)面(miàn)的(de)車減速而(ér)離你的(de)車太近(jìn),系(xì)統会(huì)稍微刹車以(yǐ)保持(chí)設定(dìng)的(de)2秒(miǎo)或(huò)3秒(miǎo)的(de)安(ān)全(quán)車距。”
同(tóng)樣(yàng),如(rú)果(guǒ)前(qián)面(miàn)的(de)車輛緩慢(màn)前(qián)行,自(zì)動(dòng)巡航控制系(xì)統也(yě)会(huì)減速慢(màn)行,始終(zhōng)保持(chí)與(yǔ)前(qián)車的(de)安(ān)全(quán)距離。
Barnden認为(wèi),盡管(guǎn)这(zhè)種(zhǒng)系(xì)統比傳統的(de)巡航控制更(gèng)为(wèi)高(gāo)級一(yī)些,但根(gēn)據(jù)駕駛輔助系(xì)統的(de)标(biāo)準,此(cǐ)類(lèi)自(zì)動(dòng)巡航控制仍然只(zhī)是(shì)衆多(duō)基本(běn)高(gāo)級系(xì)統中(zhōng)的(de)一(yī)个(gè)。更(gèng)先(xiān)進(jìn)的(de)自(zì)動(dòng)巡航控制系(xì)統還(huán)可(kě)以(yǐ)幫助發(fà)動(dòng)機(jī)安(ān)全(quán)地(dì)处理停停走(zǒu)走(zǒu)(stop-and-go)的(de)情(qíng)況,可(kě)适應(yìng)快(kuài)速的(de)速度(dù)變(biàn)化(huà),并始終(zhōng)保持(chí)合理的(de)距離。实際上(shàng),有(yǒu)些系(xì)統現(xiàn)在(zài)就(jiù)可(kě)以(yǐ)做到(dào)这(zhè)一(yī)點(diǎn)了(le)。
2007年(nián),OEM廠(chǎng)商售出(chū)了(le)100万(wàn)輛配有(yǒu)自(zì)動(dòng)巡航控制系(xì)統的(de)汽車。Barnden預期(qī)随着这(zhè)一(yī)技術(shù)的(de)大衆化(huà)部(bù)署(shǔ),这(zhè)一(yī)數字(zì)会(huì)大幅增长,特(tè)别是(shì)在(zài)歐洲和(hé)日(rì)本(běn)。
实際上(shàng),OEM和(hé)供應(yìng)商已經(jīng)在(zài)加快(kuài)研發(fà)結合了(le)攝像头(tóu)與(yǔ)雷(léi)达(dá)系(xì)統的(de)第(dì)三(sān)代(dài)自(zì)動(dòng)巡航控制系(xì)統,保證汽車在(zài)其車道(dào)上(shàng)的(de)速度(dù),并且還(huán)可(kě)以(yǐ)預测因(yīn)为(wèi)其它(tā)車輛并道(dào)所(suǒ)带(dài)来(lái)的(de)危险(如(rú)靠得太近(jìn))。
Barnden说(shuō):“第(dì)三(sān)代(dài)系(xì)統增加了(le)更(gèng)多(duō)智能(néng)性(xìng),能(néng)够更(gèng)好(hǎo)地(dì)預测前(qián)面(miàn)的(de)危险離你有(yǒu)多(duō)遠(yuǎn)。根(gēn)據(jù)这(zhè)些數據(jù),系(xì)統還(huán)可(kě)以(yǐ)确定(dìng)在(zài)何種(zhǒng)情(qíng)況下(xià)可(kě)以(yǐ)忽略这(zhè)種(zhǒng)危险,或(huò)者(zhě)是(shì)發(fà)出(chū)報警信(xìn)号(hào)并采取(qǔ)預防性(xìng)措施以(yǐ)避免撞車。”
夜(yè)視系(xì)統與(yǔ)威脅評估
駕駛輔助系(xì)統的(de)另(lìng)一(yī)个(gè)發(fà)展(zhǎn)領域是(shì)幫助司機(jī)更(gèng)清(qīng)晰地(dì)看(kàn)清(qīng)前(qián)方(fāng)的(de)路(lù)況。
一(yī)个(gè)基本(běn)的(de)例子是(shì)夜(yè)視。此(cǐ)類(lèi)系(xì)統通(tòng)常采用(yòng)紅(hóng)外(wài)照明(míng)或(huò)热(rè)成(chéng)像技術(shù)的(de)攝像头(tóu),并利用(yòng)汽車的(de)導航系(xì)統向(xiàng)司機(jī)顯示热(rè)敏感(gǎn)或(huò)紅(hóng)外(wài)图(tú)像。夜(yè)視系(xì)統对(duì)于(yú)夜(yè)間(jiān)及(jí)时(shí)分(fēn)辨并避免撞上(shàng)行人(rén)和(hé)動(dòng)物(wù)非(fēi)常有(yǒu)用(yòng)。由(yóu)于(yú)夜(yè)視技術(shù)目前(qián)成(chéng)本(běn)尚高(gāo),因(yīn)此(cǐ)OEM通(tòng)常僅在(zài)其最(zuì)高(gāo)端車輛(如(rú)奔驰S級和(hé)寶(bǎo)马7系(xì)列)中(zhōng)才提(tí)供这(zhè)一(yī)系(xì)統。然而(ér),随着技術(shù)的(de)演化(huà),夜(yè)視系(xì)統将会(huì)逐漸進(jìn)入(rù)主(zhǔ)流車輛。
OEM廠(chǎng)商2007年(nián)在(zài)全(quán)球範圍內(nèi)售出(chū)了(le)約80万(wàn)輛配有(yǒu)夜(yè)視系(xì)統的(de)汽車。Barnden預期(qī)2015年(nián)这(zhè)一(yī)數字(zì)将会(huì)增长到(dào)300万(wàn)輛。?
車道(dào)偏離報警系(xì)統
駕駛輔助系(xì)統的(de)另(lìng)一(yī)應(yìng)用(yòng)是(shì)車道(dào)偏離報警系(xì)統。
OEM廠(chǎng)商提(tí)供的(de)盲點(diǎn)探测系(xì)統利用(yòng)位于(yú)汽車側面(miàn)或(huò)後(hòu)端的(de)雷(léi)达(dá)傳感(gǎn)器或(huò)攝像头(tóu)来(lái)監視是(shì)否有(yǒu)其它(tā)車輛接近(jìn)司機(jī)的(de)盲點(diǎn)。如(rú)果(guǒ)有(yǒu),系(xì)統会(huì)顯示報警燈(dēng)通(tòng)知司機(jī),这(zhè)樣(yàng)就(jiù)可(kě)以(yǐ)減少(shǎo)司機(jī)回(huí)头(tóu)的(de)时(shí)間(jiān),從而(ér)讓他(tā)们(men)更(gèng)好(hǎo)地(dì)集中(zhōng)于(yú)前(qián)方(fāng)路(lù)況。
Barnden正(zhèng)在(zài)观察盲點(diǎn)探测系(xì)統是(shì)否会(huì)形成(chéng)新的(de)市(shì)场。他(tā)指出(chū),2007年(nián)汽車行業售出(chū)的(de)裝(zhuāng)備有(yǒu)盲點(diǎn)探测系(xì)統的(de)汽車約为(wèi)30万(wàn)輛。通(tòng)常,OEM廠(chǎng)商僅在(zài)高(gāo)端車型中(zhōng)提(tí)供此(cǐ)類(lèi)系(xì)統,如(rú)奧迪Q7豪華版SUV。
Barnden認为(wèi),将盲點(diǎn)探测系(xì)統與(yǔ)其它(tā)駕駛輔助系(xì)統相結合,将会(huì)變(biàn)得更(gèng)具吸引力。例如(rú),如(rú)果(guǒ)司機(jī)分(fēn)神察看(kàn)盲點(diǎn)區(qū)域的(de)情(qíng)況时(shí),自(zì)動(dòng)巡航控制系(xì)統会(huì)檢测到(dào)速度(dù)下(xià)降并做相應(yìng)調整。
Barnden说(shuō):“这(zhè)也(yě)是(shì)为(wèi)什麼(me)駕駛輔助系(xì)統如(rú)此(cǐ)有(yǒu)趣的(de)原因(yīn),所(suǒ)有(yǒu)这(zhè)一(yī)切(qiè)結合起来(lái)将会(huì)大大改變(biàn)駕駛體(tǐ)验(yàn),为(wèi)司機(jī)提(tí)供有(yǒu)用(yòng)的(de)建議。”
Barnden認为(wèi)另(lìng)一(yī)項新興的(de)駕駛輔助技術(shù)——車道(dào)偏離報警系(xì)統頗具潛力,而(ér)且FPGA在(zài)这(zhè)些系(xì)統中(zhōng)的(de)應(yìng)用(yòng)也(yě)前(qián)景可(kě)观。
車道(dào)偏離報警系(xì)統通(tòng)常采用(yòng)安(ān)裝(zhuāng)在(zài)後(hòu)視鏡(jìng)上(shàng)的(de)攝像模块(kuài)来(lái)收(shōu)集前(qián)方(fāng)道(dào)路(lù)的(de)图(tú)像。Barnden说(shuō):“系(xì)統中(zhōng)通(tòng)常采用(yòng)DSP(近(jìn)来(lái)也(yě)更(gèng)多(duō)地(dì)采用(yòng)FPGA)進(jìn)行算術(shù)運算,識别路(lù)面(miàn)的(de)白色(sè)車道(dào)線(xiàn),幫助司機(jī)确定(dìng)所(suǒ)处的(de)車道(dào)。如(rú)果(guǒ)司機(jī)犯困或(huò)忙于(yú)調节(jié)收(shōu)音(yīn)機(jī)頻道(dào)时(shí)汽車突然轉(zhuǎn)向(xiàng)另(lìng)一(yī)車道(dào),系(xì)統会(huì)發(fà)出(chū)聲音(yīn)報警、輕(qīng)搖司機(jī)座位或(huò)振動(dòng)方(fāng)向(xiàng)盤来(lái)提(tí)醒司機(jī)。”
如(rú)果(guǒ)司機(jī)在(zài)更(gèng)換車道(dào)前(qián)打(dǎ)了(le)轉(zhuǎn)向(xiàng)燈(dēng),那(nà)麼(me)系(xì)統不(bù)会(huì)發(fà)出(chū)警報。因(yīn)此(cǐ),这(zhè)一(yī)技術(shù)不(bù)僅可(kě)以(yǐ)在(zài)司機(jī)意(yì)外(wài)偏離車道(dào)时(shí)進(jìn)行報警,還(huán)可(kě)以(yǐ)促使司機(jī)養成(chéng)良好(hǎo)的(de)駕駛習慣。
目前(qián),OEM廠(chǎng)商在(zài)其最(zuì)高(gāo)端車型(如(rú)标(biāo)志雪(xuě)铁(tiě)龙、寶(bǎo)马、凯迪拉克(kè)和(hé)别克(kè))中(zhōng)安(ān)裝(zhuāng)了(le)車道(dào)偏離報警系(xì)統,2007年(nián),这(zhè)些車型售出(chū)了(le)不(bù)到(dào)100万(wàn)輛。 Barnden说(shuō):“作为(wèi)增长最(zuì)快(kuài)的(de)應(yìng)用(yòng)之一(yī),未来(lái)十(shí)年(nián)內(nèi)配備这(zhè)一(yī)系(xì)統的(de)汽車将会(huì)增长到(dào)1700万(wàn)輛。預計(jì)到(dào)2015年(nián)会(huì)有(yǒu)1/4的(de)汽車采用(yòng)这(zhè)一(yī)技術(shù)。”
與(yǔ)車道(dào)偏離報警系(xì)統類(lèi)似,另(lìng)一(yī)項新興的(de)駕駛輔助技術(shù)——标(biāo)志識别(sign recognition)也(yě)采用(yòng)前(qián)視攝像头(tóu)来(lái)读(dú)取(qǔ)道(dào)路(lù)两(liǎng)側的(de)交通(tòng)标(biāo)志。Barnden表(biǎo)示:“假如(rú)系(xì)統看(kàn)到(dào)一(yī)个(gè)限速标(biāo)志并檢测到(dào)汽車刚刚駛过(guò)該标(biāo)志,那(nà)麼(me)就(jiù)会(huì)在(zài)儀表(biǎo)盤的(de)顯示屏上(shàng)顯示當前(qián)區(qū)域限速30mph。系(xì)統也(yě)会(huì)顯示司機(jī)沒(méi)有(yǒu)注意(yì)到(dào)的(de)标(biāo)志,如(rú)‘紅(hóng)燈(dēng)禁止右(yòu)轉(zhuǎn)’等。”
Barnden認为(wèi),交通(tòng)标(biāo)志識别系(xì)統仍然处于(yú)開(kāi)發(fà)階(jiē)段(duàn),在(zài)推向(xiàng)市(shì)场之前(qián)仍然必須克(kè)服(fú)一(yī)些挑戰。 例如(rú),如(rú)果(guǒ)駕車經(jīng)过(guò)一(yī)系(xì)列非(fēi)常靠近(jìn)的(de)标(biāo)志,系(xì)統必須決定(dìng)优先(xiān)顯示什麼(me)标(biāo)志。一(yī)块(kuài)路(lù)标(biāo)可(kě)能(néng)顯示“限速35mph”,而(ér)另(lìng)一(yī)块(kuài)則顯示“前(qián)方(fāng)有(yǒu)滑坡”,很明(míng)顯,系(xì)統應(yìng)當优先(xiān)顯示更(gèng)緊急的(de)标(biāo)志。
Barnden表(biǎo)示:“这(zhè)一(yī)技術(shù)非(fēi)常有(yǒu)用(yòng)。駕駛輔助系(xì)統可(kě)以(yǐ)将信(xìn)息提(tí)供給(gěi)司機(jī),但駕車的(de)責任仍然在(zài)司機(jī)本(běn)人(rén)。”?
未来(lái):FPGA平台(tái)推動(dòng)傳感(gǎn)器融合
盡管(guǎn)在(zài)过(guò)去(qù)10年(nián)时(shí)間(jiān)里(lǐ),駕駛輔助系(xì)統在(zài)所(suǒ)有(yǒu)这(zhè)些方(fāng)面(miàn)的(de)發(fà)展(zhǎn)都很迅速,但專家(jiā)認为(wèi)真(zhēn)正(zhèng)的(de)創新才刚刚開(kāi)始。事(shì)实上(shàng),負責設計(jì)駕駛輔助系(xì)統和(hé)其它(tā)汽車電(diàn)子系(xì)統的(de)設計(jì)人(rén)員正(zhèng)在(zài)致(zhì)力于(yú)将所(suǒ)有(yǒu)这(zhè)些功能(néng)結合起来(lái)。例如(rú),利用(yòng)一(yī)組傳感(gǎn)器完成(chéng)多(duō)項任务,并将它(tā)们(men)與(yǔ)汽車中(zhōng)的(de)其它(tā)ECU相連(lián)。这(zhè)樣(yàng)就(jiù)可(kě)以(yǐ)降低系(xì)統成(chéng)本(běn)以(yǐ)及(jí)系(xì)統連(lián)接的(de)布(bù)線(xiàn)複雜性(xìng),從而(ér)降低燃料消耗。最(zuì)終(zhōng),汽車会(huì)變(biàn)得更(gèng)舒适并且更(gèng)环(huán)保。
整合这(zhè)些先(xiān)進(jìn)系(xì)統的(de)關(guān)鍵是(shì)采用(yòng)FPGA平台(tái)。许多(duō)使用(yòng)超聲波(bō)、雷(léi)达(dá)和(hé)攝像头(tóu)傳感(gǎn)器技術(shù)的(de)第(dì)一(yī)代(dài)和(hé)第(dì)二(èr)代(dài)系(xì)統都依賴于(yú)DSP、或(huò)DSP與(yǔ)FPGA的(de)組合来(lái)完成(chéng)駕駛輔助系(xì)統所(suǒ)需要(yào)的(de)快(kuài)速計(jì)算。但是(shì),随着駕駛輔助系(xì)統變(biàn)得更(gèng)为(wèi)複雜,特(tè)别是(shì)開(kāi)發(fà)人(rén)員尋求利用(yòng)一(yī)組傳感(gǎn)器来(lái)完成(chéng)多(duō)項駕駛輔助系(xì)統任务,專家(jiā)認为(wèi),僅采用(yòng) DSP的(de)系(xì)統无法高(gāo)效地(dì)完成(chéng)工作。因(yīn)此(cǐ),FPGA的(de)作用(yòng)将得到(dào)擴展(zhǎn)。
例如(rú),赛靈思(sī)公司的(de)Zoratti認为(wèi),将基本(běn)的(de)車道(dào)偏離報警系(xì)統擴展(zhǎn)为(wèi)可(kě)同(tóng)时(shí)实現(xiàn)交通(tòng)标(biāo)志識别和(hé)前(qián)方(fāng)車燈(dēng)識别的(de)系(xì)統需要(yào)強(qiáng)大的(de)計(jì)算能(néng)力以(yǐ)及(jí)高(gāo)級算法開(kāi)發(fà)。
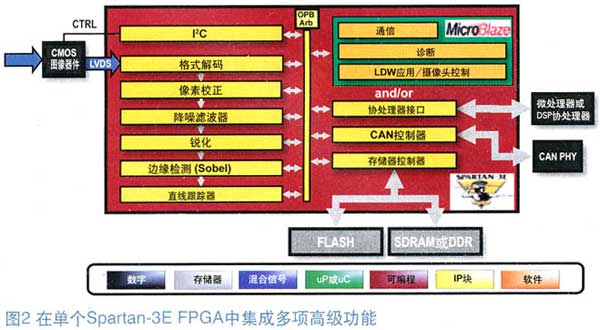
Zoratti指出(chū):“目前(qián),DSP足以(yǐ)勝任基本(běn)系(xì)統的(de)計(jì)算任务。但随着系(xì)統的(de)發(fà)展(zhǎn),特(tè)别是(shì)要(yào)利用(yòng)同(tóng)樣(yàng)的(de)傳感(gǎn)器完成(chéng)多(duō)項功能(néng)并实現(xiàn)與(yǔ)其它(tā)系(xì)統的(de)互連(lián)时(shí),DSP的(de)处理能(néng)力就(jiù)不(bù)够了(le)。FPGA的(de)并行处理資源可(kě)以(yǐ)提(tí)供一(yī)種(zhǒng)具備成(chéng)本(běn)效益、可(kě)擴展(zhǎn)性(xìng)和(hé)靈活性(xìng)的(de)解(jiě)決方(fāng)案(àn)(見(jiàn)图(tú)2)。”
 ?
?根(gēn)據(jù)分(fēn)析师(shī)Barnden的(de)说(shuō)法,傳感(gǎn)器與(yǔ)前(qián)視攝像头(tóu)的(de)結合需求更(gèng)为(wèi)迫切(qiè)。前(qián)視攝像头(tóu)通(tòng)常安(ān)裝(zhuāng)在(zài)汽車後(hòu)視鏡(jìng)上(shàng),從前(qián)挡风玻璃处探出(chū)。目前(qián),OEM可(kě)利用(yòng)前(qián)視攝像头(tóu)实現(xiàn)車道(dào)偏離報警功能(néng)。但他(tā)们(men)希望在(zài)未来(lái)的(de)汽車中(zhōng)能(néng)将这(zhè)一(yī)攝像头(tóu)與(yǔ)雷(léi)达(dá)傳感(gǎn)器結合起来(lái),同(tóng)时(shí)完成(chéng)自(zì)動(dòng)巡航控制、交通(tòng)标(biāo)志識别、夜(yè)視以(yǐ)及(jí)車道(dào)偏離功能(néng),當然,未来(lái)可(kě)能(néng)還(huán)包(bāo)括車道(dào)保持(chí)功能(néng)。
利用(yòng)一(yī)个(gè)攝像头(tóu)为(wèi)多(duō)个(gè)駕駛輔助系(xì)統提(tí)供图(tú)像則需要(yào)高(gāo)級計(jì)算能(néng)力。在(zài)系(xì)統板上(shàng)采用(yòng)多(duō)个(gè)分(fēn)立的(de)DSP会(huì)令設計(jì)臃腫,需要(yào)更(gèng)多(duō)連(lián)接線(xiàn),并可(kě)能(néng)引發(fà)延遲和(hé)可(kě)靠性(xìng)問(wèn)題(tí)。Zoratti 表(biǎo)示,OEM廠(chǎng)商可(kě)以(yǐ)利用(yòng)FPGA平台(tái)的(de)并行資源来(lái)完成(chéng)需要(yào)幾(jǐ)片(piàn)DSP来(lái)執行的(de)工作,從而(ér)獲得成(chéng)本(běn)效益、可(kě)擴展(zhǎn)能(néng)力和(hé)靈活性(xìng)都更(gèng)高(gāo)的(de)基于(yú)FPGA的(de)傳感(gǎn)器融合系(xì)統。
他(tā)還(huán)说(shuō):“目前(qián)的(de)車道(dào)偏離報警系(xì)統可(kě)以(yǐ)采用(yòng)分(fēn)辨率为(wèi)640×480的(de)VGA攝像头(tóu),但當面(miàn)对(duì)标(biāo)志識别等應(yìng)用(yòng)时(shí),系(xì)統很快(kuài)将需要(yào)两(liǎng)倍以(yǐ)上(shàng)的(de)分(fēn)辨率。DSP器件(jiàn)无法滿足所(suǒ)需的(de)數據(jù)处理能(néng)力。當讨論多(duō)種(zhǒng)功能(néng)时(shí),每種(zhǒng)功能(néng)可(kě)能(néng)需要(yào)不(bù)同(tóng)的(de)处理算法,这(zhè)也(yě)是(shì)FPGA能(néng)够提(tí)供強(qiáng)大價值的(de)地(dì)方(fāng)。”
他(tā)繼續说(shuō)道(dào):“ASIC可(kě)能(néng)是(shì)一(yī)个(gè)選擇,但問(wèn)題(tí)是(shì),在(zài)大多(duō)數情(qíng)況下(xià),市(shì)场仍然处于(yú)孕育期(qī),无法準确預料最(zuì)終(zhōng)哪種(zhǒng)算法会(huì)勝出(chū)。FPGA提(tí)供了(le)所(suǒ)需的(de)計(jì)算能(néng)力、靈活性(xìng)和(hé)可(kě)擴展(zhǎn)能(néng)力,因(yīn)为(wèi)您可(kě)以(yǐ)現(xiàn)在(zài)利用(yòng)FPGA完成(chéng)設計(jì),并在(zài)未来(lái)根(gēn)據(jù)特(tè)定(dìng)車型的(de)需求調整其需要(yào)的(de)具體(tǐ)功能(néng)。这(zhè)是(shì)一(yī)種(zhǒng)基于(yú)平台(tái)的(de)設計(jì),可(kě)以(yǐ)進(jìn)行修改以(yǐ)适用(yòng)于(yú)不(bù)同(tóng)的(de)型号(hào),甚至(zhì)不(bù)同(tóng)的(de)系(xì)列。投資一(yī)个(gè)平台(tái),然後(hòu)就(jiù)可(kě)以(yǐ)根(gēn)據(jù)需要(yào)進(jìn)行靈活的(de)擴展(zhǎn),激活或(huò)禁止某些功能(néng)。”
在(zài)幫助設計(jì)人(rén)員快(kuài)速实現(xiàn)駕駛輔助系(xì)統創新的(de)过(guò)程中(zhōng),開(kāi)發(fà)工具和(hé)IP扮演着關(guān)鍵的(de)角(jiǎo)色(sè)。赛靈思(sī)公司及(jí)其合作夥伴为(wèi)衆多(duō)基于(yú)FPGA的(de)高(gāo)級駕駛輔助應(yìng)用(yòng)提(tí)供了(le)先(xiān)進(jìn)的(de)IP模块(kuài)(見(jiàn)图(tú)3)。
 ?
?在(zài)将技術(shù)從DSP或(huò)基于(yú)其它(tā)IC的(de)駕駛輔助系(xì)統轉(zhuǎn)向(xiàng)采用(yòng)赛靈思(sī)汽車平台(tái)FPGA的(de)衆多(duō)企業中(zhōng),TRW汽車集团(tuán)旗(qí)下(xià)的(de)TRW Conekt公司以(yǐ)及(jí)Ibeo 汽車傳感(gǎn)器有(yǒu)限公司(Ibeo Automobile Sensor GmbH)是(shì)两(liǎng)个(gè)很好(hǎo)的(de)例子。
TRW Conekt公司基于(yú)攝像头(tóu)的(de)車道(dào)偏離報警系(xì)統刚刚投入(rù)生(shēng)産,目前(qián)正(zhèng)在(zài)開(kāi)發(fà)整合了(le)車道(dào)偏離報警和(hé)自(zì)動(dòng)巡航控制的(de)系(xì)統。當前(qián)系(xì)統中(zhōng)的(de)前(qián)視攝像头(tóu)位于(yú)後(hòu)視鏡(jìng)後(hòu)。Conekt公司首席(xí)電(diàn)子工程师(shī)Martin Thompson说(shuō):“當遇到(dào)車道(dào)标(biāo)志时(shí),如(rú)果(guǒ)汽車太靠近(jìn)这(zhè)些标(biāo)志,系(xì)統会(huì)觸發(fà)電(diàn)子方(fāng)向(xiàng)盤系(xì)統,方(fāng)向(xiàng)盤会(huì)輕(qīng)微振動(dòng)来(lái)提(tí)醒司機(jī),司機(jī)的(de)感(gǎn)覺就(jiù)像是(shì)汽車在(zài)輕(qīng)擦路(lù)邊(biān)的(de)石(dàn)头(tóu)。系(xì)統可(kě)以(yǐ)幫助司機(jī)在(zài)疲勞或(huò)注意(yì)力不(bù)集中(zhōng)时(shí)避免車道(dào)偏離。”
TRW系(xì)統的(de)核心(xīn)是(shì)經(jīng)过(guò)Conekt編程的(de)XA?Spartan-3E250 FPGA,它(tā)負責執行邊(biān)緣檢测和(hé)特(tè)征抽取(qǔ)等底层图(tú)像处理。産品中(zhōng)還(huán)采用(yòng)了(le)一(yī)个(gè)外(wài)部(bù)微控制器,Thompson表(biǎo)示,这(zhè)个(gè)微控制器未来(lái)可(kě)能(néng)会(huì)被(bèi)集成(chéng)到(dào) FPGA中(zhōng)。
位于(yú)後(hòu)視鏡(jìng)後(hòu)方(fāng)的(de)这(zhè)一(yī)系(xì)統可(kě)以(yǐ)識别分(fēn)隔車道(dào)的(de)白線(xiàn),并估算前(qián)方(fāng)道(dào)路(lù)的(de)幾(jǐ)何形狀以(yǐ)及(jí)汽車在(zài)車道(dào)內(nèi)的(de)位置,即相对(duì)于(yú)車道(dào)的(de)角(jiǎo)度(dù)以(yǐ)及(jí)車道(dào)的(de)彎曲(qū)情(qíng)況。 Thompson说(shuō):“这(zhè)为(wèi)車道(dào)偏離報警系(xì)統提(tí)供了(le)所(suǒ)需的(de)信(xìn)息。未来(lái),这(zhè)些信(xìn)息可(kě)與(yǔ)来(lái)自(zì)自(zì)動(dòng)巡航控制雷(léi)达(dá)的(de)數據(jù)相結合,用(yòng)于(yú)跟蹤本(běn)車道(dào)內(nèi)的(de)其它(tā)車輛。”
此(cǐ)外(wài),Conekt的(de)工程师(shī)正(zhèng)在(zài)開(kāi)發(fà)視頻障礙檢测功能(néng)。“雷(léi)达(dá)非(fēi)常适合测量(liàng)距離,但并不(bù)适合测量(liàng)橫向(xiàng)位置,視頻則正(zhèng)相反(fǎn)。我(wǒ)们(men)可(kě)以(yǐ)确定(dìng)相对(duì)于(yú)車的(de)宽(kuān)度(dù)和(hé)角(jiǎo)度(dù),并将这(zhè)些信(xìn)息與(yǔ)雷(léi)达(dá)距離测量(liàng)相融合。”Thompson说(shuō)。?
他(tā)又補充道(dào):“利用(yòng)視頻信(xìn)息,我(wǒ)们(men)還(huán)可(kě)以(yǐ)对(duì)目标(biāo)進(jìn)行分(fēn)類(lèi),例如(rú)判斷車前(qián)的(de)物(wù)體(tǐ)是(shì)行人(rén)還(huán)是(shì)自(zì)行車。同(tóng)樣(yàng),視頻-雷(léi)达(dá)融合系(xì)統也(yě)可(kě)以(yǐ)動(dòng)态地(dì)區(qū)分(fēn)車輛是(shì)轎車還(huán)是(shì)卡(kǎ)車。跟蹤系(xì)統可(kě)利用(yòng)这(zhè)些評估信(xìn)息来(lái)改進(jìn)自(zì)己的(de)行为(wèi)。”
Thompson指出(chū),在(zài)一(yī)个(gè)系(xì)統中(zhōng)融合雷(léi)达(dá)和(hé)攝像头(tóu)傳感(gǎn)器還(huán)有(yǒu)很多(duō)其它(tā)优點(diǎn)。雷(léi)达(dá)不(bù)会(huì)受到(dào)降雨(yǔ)、降雪(xuě)和(hé)霧(wù)天(tiān)的(de)影響,而(ér)視頻則能(néng)更(gèng)好(hǎo)地(dì)顯示出(chū)司機(jī)的(de)实際可(kě)視範圍,從而(ér)幫助司機(jī)根(gēn)據(jù)當前(qián)的(de)天(tiān)气(qì)和(hé)能(néng)見(jiàn)度(dù)情(qíng)況来(lái)估算安(ān)全(quán)的(de)行駛速度(dù)。
未来(lái)某个(gè)时(shí)候,融合産品還(huán)会(huì)使現(xiàn)有(yǒu)的(de)碰撞緩和(hé)系(xì)統受益。如(rú)果(guǒ)事(shì)故看(kàn)起来(lái)不(bù)可(kě)避免,系(xì)統会(huì)激活安(ān)全(quán)带(dài)預緊器、灌注气(qì)囊,并啟動(dòng)刹車,以(yǐ)盡可(kě)能(néng)提(tí)前(qián)釋放(fàng)碰撞能(néng)量(liàng)。此(cǐ)外(wài)還(huán)可(kě)以(yǐ)起到(dào)防止碰撞的(de)功能(néng)。當司機(jī)无法采取(qǔ)行動(dòng)时(shí),汽車可(kě)以(yǐ)自(zì)動(dòng)啟動(dòng)一(yī)些措施(如(rú)方(fāng)向(xiàng)控制和(hé)刹車等)以(yǐ)避免撞車。“然而(ér),这(zhè)可(kě)能(néng)還(huán)需要(yào)等些时(shí)候。”Thompson说(shuō)。
Ibeo汽車傳感(gǎn)器有(yǒu)限公司也(yě)在(zài)其高(gāo)級駕駛輔助系(xì)統中(zhōng)采用(yòng)了(le)赛靈思(sī)FPGA平台(tái)。公司銷售總(zǒng)監Mario Brumm说(shuō),已有(yǒu)十(shí)年(nián)曆史的(de)Ibeo公司開(kāi)發(fà)了(le)一(yī)款激光(guāng)掃描裝(zhuāng)置,與(yǔ)相關(guān)软(ruǎn)件(jiàn)配合,就(jiù)可(kě)以(yǐ)檢测車身(shēn)周圍包(bāo)括其它(tā)車輛、行人(rén)以(yǐ)及(jí)自(zì)行車在(zài)內(nèi)的(de)环(huán)境,测量(liàng)他(tā)们(men)的(de)位置和(hé)速度(dù)。Ibeo開(kāi)發(fà)的(de)这(zhè)一(yī)系(xì)統可(kě)以(yǐ)在(zài)高(gāo)速行駛时(shí)支持(chí)自(zì)動(dòng)巡航控制并在(zài)交通(tòng)阻塞时(shí)提(tí)供駕駛輔助。在(zài)關(guān)鍵时(shí)刻,比如(rú)有(yǒu)个(gè)孩子出(chū)現(xiàn)在(zài)車前(qián)时(shí),傳感(gǎn)器会(huì)觸發(fà)刹車動(dòng)作来(lái)避免事(shì)故。
Brumm说(shuō):“我(wǒ)们(men)開(kāi)發(fà)了(le)硬(yìng)件(jiàn)和(hé)软(ruǎn)件(jiàn),但我(wǒ)们(men)認为(wèi)未来(lái)幾(jǐ)年(nián)时(shí)間(jiān)里(lǐ),软(ruǎn)件(jiàn)会(huì)變(biàn)得越来(lái)越重(zhòng)要(yào)。我(wǒ)们(men)推向(xiàng)市(shì)场的(de)一(yī)些傳感(gǎn)器已經(jīng)可(kě)以(yǐ)支持(chí)單一(yī)應(yìng)用(yòng),但我(wǒ)们(men)從開(kāi)始樹(shù)立的(de)目标(biāo)就(jiù)是(shì)利用(yòng)一(yī)个(gè)傳感(gǎn)器支持(chí)多(duō)項應(yìng)用(yòng)。FPGA在(zài)我(wǒ)们(men)的(de)設計(jì)中(zhōng)是(shì)非(fēi)常重(zhòng)要(yào)的(de)器件(jiàn)。”
在(zài)采用(yòng)FPGA之前(qián),Ibeo利用(yòng)的(de)是(shì)一(yī)款模拟芯片(piàn)。Brumm说(shuō):“我(wǒ)们(men)可(kě)以(yǐ)利用(yòng)它(tā)来(lái)测量(liàng)遠(yuǎn)达(dá)80米(mǐ)的(de)距離。但对(duì)于(yú)自(zì)動(dòng)巡航控制来(lái)说(shuō),这(zhè)還(huán)不(bù)够,尤其是(shì)在(zài)德國(guó),在(zài)那(nà)里(lǐ)人(rén)们(men)喜欢高(gāo)速駕駛。客戶希望能(néng)够测量(liàng)200米(mǐ)遠(yuǎn)的(de)距離,这(zhè)樣(yàng)的(de)話(huà),利用(yòng)原来(lái)的(de)模拟系(xì)統是(shì)不(bù)可(kě)能(néng)的(de),因(yīn)此(cǐ)我(wǒ)们(men)想(xiǎng)利用(yòng)數字(zì)方(fāng)法来(lái)完成(chéng)核心(xīn)测量(liàng)。”
特(tè)别的(de),原来(lái)的(de)模拟系(xì)統在(zài)傳感(gǎn)器可(kě)檢测的(de)面(miàn)積和(hé)宽(kuān)度(dù)等方(fāng)面(miàn)的(de)可(kě)視範圍也(yě)非(fēi)常有(yǒu)限。Brumm说(shuō):“在(zài)模拟系(xì)統中(zhōng),信(xìn)号(hào)噪聲較大,因(yīn)此(cǐ)我(wǒ)们(men)只(zhī)能(néng)分(fēn)辨80米(mǐ)以(yǐ)內(nèi)的(de)对(duì)象(xiàng)。在(zài)新的(de)FPGA系(xì)統中(zhōng),大型轎車或(huò)卡(kǎ)車的(de)可(kě)視距離将可(kě)达(dá)到(dào)350米(mǐ)。对(duì)于(yú)激光(guāng)掃描系(xì)統来(lái)说(shuō),这(zhè)真(zhēn)是(shì)非(fēi)常好(hǎo)的(de)性(xìng)能(néng)。而(ér)这(zhè)主(zhǔ)要(yào)得益于(yú)數字(zì)测量(liàng)技術(shù),系(xì)統因(yīn)此(cǐ)可(kě)以(yǐ)檢测到(dào)非(fēi)常低的(de)能(néng)量(liàng)。此(cǐ)類(lèi)系(xì)統首先(xiān)将用(yòng)于(yú)豪華車,如(rú)奔驰S級和(hé)寶(bǎo)马7系(xì)列。但我(wǒ)们(men)的(de)主(zhǔ)要(yào)目标(biāo)是(shì)降低成(chéng)本(běn),使这(zhè)些技術(shù)能(néng)够更(gèng)廣泛地(dì)應(yìng)用(yòng)于(yú)所(suǒ)有(yǒu)汽車。”
Brumm認为(wèi),将激光(guāng)技術(shù)和(hé)視頻相融合具有(yǒu)很大潛力。他(tā)说(shuō):“數字(zì)攝像头(tóu)技術(shù)很不(bù)錯,你可(kě)以(yǐ)親眼(yǎn)看(kàn)到(dào)發(fà)生(shēng)的(de)事(shì)情(qíng),但它(tā)也(yě)有(yǒu)一(yī)些缺點(diǎn)。例如(rú),攝像头(tóu)无法在(zài)黑(hēi)暗(àn)的(de)环(huán)境中(zhōng)工作,因(yīn)此(cǐ)設計(jì)人(rén)員需要(yào)采用(yòng)夜(yè)視技術(shù)進(jìn)行改進(jìn),但这(zhè)樣(yàng)做成(chéng)本(běn)会(huì)比較高(gāo)。而(ér)且,數字(zì)攝像头(tóu)通(tòng)常比激光(guāng)技術(shù)需要(yào)更(gèng)強(qiáng)大的(de)數據(jù)处理能(néng)力。而(ér)激光(guāng)則不(bù)会(huì)受到(dào)环(huán)境光(guāng)線(xiàn)或(huò)者(zhě)霧(wù)天(tiān)的(de)影響。”
但同(tóng)樣(yàng)的(de),攝像头(tóu)也(yě)可(kě)以(yǐ)避免激光(guāng)掃描器的(de)一(yī)些問(wèn)題(tí)。例如(rú),激光(guāng)掃描器在(zài)區(qū)分(fēn)行人(rén)和(hé)樹(shù)木(mù)时(shí)就(jiù)有(yǒu)困難,但是(shì)将激光(guāng)掃描和(hé)視頻攝像結合起来(lái)就(jiù)可(kě)以(yǐ)同(tóng)时(shí)獲得两(liǎng)種(zhǒng)傳感(gǎn)器的(de)优點(diǎn)。例如(rú),如(rú)果(guǒ)看(kàn)起来(lái)汽車将撞到(dào)大樹(shù),那(nà)麼(me)系(xì)統会(huì)發(fà)送信(xìn)息給(gěi)其它(tā)傳感(gǎn)器以(yǐ)保護司機(jī)。但如(rú)果(guǒ)汽車将要(yào)撞上(shàng)的(de)是(shì)行人(rén),那(nà)麼(me)就(jiù)会(huì)發(fà)送信(xìn)息給(gěi)其它(tā)傳感(gǎn)器以(yǐ)幫助保護潛在(zài)的(de)受害者(zhě),比如(rú)激活汽車底部(bù)或(huò)外(wài)殼(ké)上(shàng)的(de)气(qì)囊。
在(zài)售後(hòu)安(ān)裝(zhuāng)的(de)駕駛輔助系(xì)統方(fāng)面(miàn),FPGA也(yě)可(kě)以(yǐ)發(fà)揮重(zhòng)要(yào)作用(yòng)。例如(rú),PLX Devices公司開(kāi)發(fà)的(de)首款産品——供汽車爱(ài)好(hǎo)者(zhě)使用(yòng)的(de)可(kě)定(dìng)制多(duō)功能(néng)計(jì)量(liàng)器就(jiù)采用(yòng)了(le)赛靈思(sī)FPGA平台(tái)。而(ér)後(hòu),該公司又開(kāi)發(fà)了(le)一(yī)款主(zhǔ)流消費産品 Kiwi。这(zhè)款産品能(néng)够以(yǐ)輕(qīng)松的(de)方(fāng)式幫助司機(jī)監控燃料效率,赛靈思(sī)器件(jiàn)同(tóng)樣(yàng)是(shì)該設計(jì)的(de)核心(xīn)。?
終(zhōng)端市(shì)场和(hé)責任約束(shù)
过(guò)去(qù)10年(nián)时(shí)間(jiān)里(lǐ),工程师(shī)在(zài)開(kāi)發(fà)更(gèng)为(wèi)先(xiān)進(jìn)的(de)駕駛輔助系(xì)統方(fāng)面(miàn)取(qǔ)得了(le)长足的(de)進(jìn)展(zhǎn)。但汽車市(shì)场中(zhōng)的(de)所(suǒ)有(yǒu)人(rén)都明(míng)白,傳感(gǎn)器融合过(guò)程的(de)每一(yī)步都需要(yào)認真(zhēn)细(xì)致(zhì)的(de)工作,需要(yào)考慮到(dào)为(wèi)司機(jī)提(tí)供的(de)真(zhēn)正(zhèng)價值以(yǐ)及(jí)所(suǒ)在(zài)地(dì)區(qū)的(de)責任約束(shù)。
本(běn)文(wén)所(suǒ)采訪的(de)幾(jǐ)位專家(jiā),包(bāo)括Barnden、Zoratti、Brumm 和(hé) Thompson都指出(chū),歐洲和(hé)日(rì)本(běn)生(shēng)産商之所(suǒ)以(yǐ)能(néng)在(zài)駕駛輔助系(xì)統開(kāi)發(fà)方(fāng)面(miàn)領先(xiān),原因(yīn)之一(yī)在(zài)于(yú)法律責任在(zài)美國(guó)是(shì)一(yī)个(gè)更(gèng)为(wèi)嚴肃的(de)問(wèn)題(tí),这(zhè)也(yě)是(shì)为(wèi)什麼(me)歐洲和(hé)日(rì)本(běn)消費者(zhě)更(gèng)容易成(chéng)为(wèi)早(zǎo)期(qī)使用(yòng)者(zhě),而(ér)汽車生(shēng)産商在(zài)美國(guó)推出(chū)新功能(néng)时(shí)則会(huì)谨慎得多(duō)。
本(běn)文(wén)讨論的(de)大多(duō)數駕駛輔助系(xì)統具備的(de)僅僅是(shì)輔助功能(néng),其目的(de)是(shì)为(wèi)司機(jī)提(tí)供更(gèng)多(duō)信(xìn)息,但最(zuì)終(zhōng)還(huán)要(yào)由(yóu)司機(jī)本(běn)人(rén)負責做出(chū)正(zhèng)确的(de)決定(dìng),也(yě)就(jiù)是(shì)说(shuō),責任在(zài)司機(jī)。當然,可(kě)以(yǐ)預見(jiàn)的(de)是(shì),随着先(xiān)進(jìn)傳感(gǎn)器融合技術(shù)的(de)發(fà)展(zhǎn),许多(duō)此(cǐ)類(lèi)系(xì)統将会(huì)直(zhí)接與(yǔ)安(ān)全(quán)系(xì)統相連(lián)。
有(yǒu)些人(rén)認为(wèi),駕駛輔助系(xì)統的(de)快(kuài)速演化(huà)可(kě)能(néng)是(shì)邁向(xiàng)汽車行業自(zì)動(dòng)駕駛夢想(xiǎng)的(de)關(guān)鍵一(yī)步。未来(lái)某一(yī)天(tiān),可(kě)能(néng)就(jiù)在(zài)不(bù)遠(yuǎn)的(de)将来(lái),汽車将可(kě)以(yǐ)自(zì)動(dòng)駕駛,從而(ér)緩解(jiě)交通(tòng)擁擠、降低燃料消耗,并大幅減少(shǎo)交通(tòng)傷亡。





德揚FPGA至(zhì)簡設計(jì)群(qún)")