



擊聯系(xì)吴工")

本(běn)文(wén)为(wèi)明(míng)德揚原創文(wén)章(zhāng),轉(zhuǎn)载請注明(míng)出(chū)处!
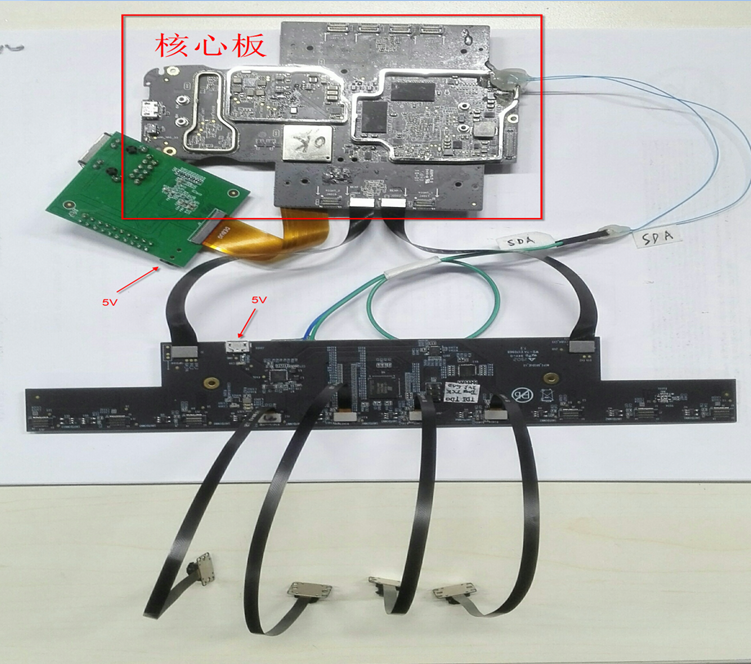
在(zài)我(wǒ)们(men)的(de)MIPI多(duō)路(lù)攝像头(tóu)拼接項目中(zhōng),需要(yào)用(yòng)到(dào)MIPI通(tòng)信(xìn)協議,此(cǐ)項目包(bāo)含核心(xīn)板一(yī)块(kuài),核心(xīn)板供電(diàn)板(綠(lǜ)色(sè))一(yī)块(kuài),AR0144攝像头(tóu)4枚,能(néng)够实現(xiàn)4路(lù)MIPI图(tú)像數據(jù),每2路(lù)做左(zuǒ)右(yòu)拼接後(hòu),得到(dào)2路(lù)攝像头(tóu)數據(jù),再按MIPI CSI協議發(fà)送給(gěi)海思(sī)方(fāng)案(àn)芯片(piàn)。主(zhǔ)要(yào)功能(néng)包(bāo)括D-PHY協議解(jiě)析、CSI協議解(jiě)析、图(tú)像拼接、CSI協議打(dǎ)包(bāo)和(hé)D-PHY協議打(dǎ)包(bāo)等。
下(xià)面(miàn)簡單的(de)介紹一(yī)下(xià)MIPI協議:
MIPI (Mobile Industry Processor Interface) 是(shì)2003年(nián)由(yóu)ARM, Nokia, ST ,TI等公司成(chéng)立的(de)一(yī)个(gè)聯盟,目的(de)是(shì)把手(shǒu)機(jī)內(nèi)部(bù)的(de)接口(kǒu)如(rú)攝像头(tóu)、顯示屏接口(kǒu)、射頻/基带(dài)接口(kǒu)等标(biāo)準化(huà),從而(ér)減少(shǎo)手(shǒu)機(jī)設計(jì)的(de)複雜程度(dù)和(hé)增加設計(jì)靈活性(xìng)。MIPI聯盟下(xià)面(miàn)有(yǒu)不(bù)同(tóng)的(de)WorkGroup,分(fēn)别定(dìng)義了(le)一(yī)系(xì)列的(de)手(shǒu)機(jī)內(nèi)部(bù)接口(kǒu)标(biāo)準,比如(rú)攝像头(tóu)接口(kǒu)CSI、顯示接口(kǒu)DSI、射頻接口(kǒu)DigRF、麥克(kè)风 /喇叭接口(kǒu)SLIMbus等。統一(yī)接口(kǒu)标(biāo)準的(de)好(hǎo)处是(shì)手(shǒu)機(jī)廠(chǎng)商根(gēn)據(jù)需要(yào)可(kě)以(yǐ)從市(shì)面(miàn)上(shàng)靈活選擇不(bù)同(tóng)的(de)芯片(piàn)和(hé)模組,更(gèng)改設計(jì)和(hé)功能(néng)时(shí)更(gèng)加快(kuài)捷方(fāng)便。下(xià)图(tú)是(shì)按照 MIPI的(de)規劃(huà)下(xià)一(yī)代(dài)智能(néng)手(shǒu)機(jī)的(de)內(nèi)部(bù)架構。
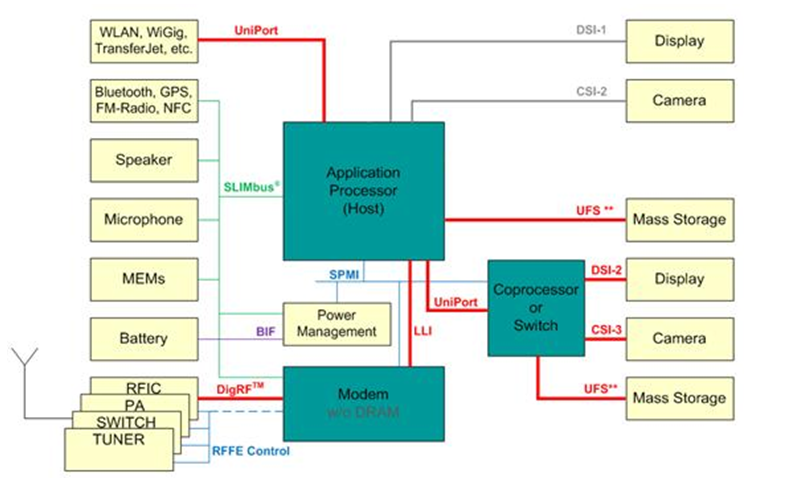
图(tú)2 MIPI下(xià)一(yī)代(dài)智能(néng)手(shǒu)機(jī)內(nèi)部(bù)框架
MIPI是(shì)一(yī)个(gè)比較新的(de)标(biāo)準,其規範也(yě)在(zài)不(bù)斷修改和(hé)改進(jìn),目前(qián)比較成(chéng)熟的(de)接口(kǒu)應(yìng)用(yòng)有(yǒu)DSI(顯示接口(kǒu))和(hé)CSI(攝像头(tóu)接口(kǒu))。CSI/DSI分(fēn)别是(shì)指其承载的(de)是(shì)針(zhēn)对(duì)Camera或(huò)Display應(yìng)用(yòng),都有(yǒu)複雜的(de)協議結構。以(yǐ)DSI为(wèi)例,其協議层結構如(rú)下(xià):
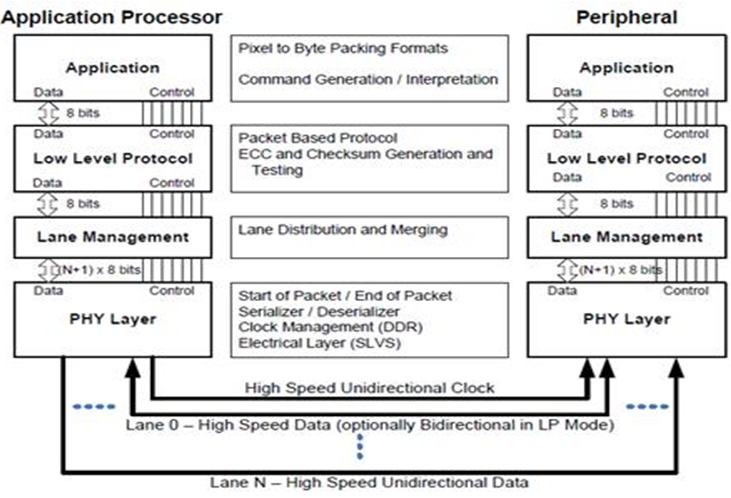
图(tú)3 DSI協議层
CSI/DSI的(de)物(wù)理层(Phy Layer)由(yóu)專門(mén)的(de)WorkGroup負責制定(dìng),其目前(qián)的(de)标(biāo)準是(shì)D-PHY。D-PHY采用(yòng)1对(duì)源同(tóng)步的(de)差分(fēn)时(shí)鐘(zhōng)和(hé)1~4对(duì)差分(fēn)數據(jù)線(xiàn)来(lái)進(jìn)行數據(jù)傳輸。數據(jù)傳輸采用(yòng)DDR方(fāng)式,即在(zài)时(shí)鐘(zhōng)的(de)上(shàng)下(xià)邊(biān)沿都有(yǒu)數據(jù)傳輸。
PHY的(de)物(wù)理层支持(chí)HS(High Speed)和(hé)LP(Low Power)两(liǎng)種(zhǒng)工作模式。HS模式下(xià)采用(yòng)低壓差分(fēn)信(xìn)号(hào),功耗較大,但是(shì)可(kě)以(yǐ)傳輸很高(gāo)的(de)數據(jù)速率(數據(jù)速率为(wèi)80M~1Gbps);LP模式下(xià)采用(yòng)單端信(xìn)号(hào),數據(jù)速率很低(<10Mbps),但是(shì)相應(yìng)的(de)功耗也(yě)很低。两(liǎng)種(zhǒng)模式的(de)結合保證了(le)MIPI總(zǒng)線(xiàn)在(zài)需要(yào)傳輸大量(liàng)數據(jù)(如(rú)图(tú)4)时(shí)可(kě)以(yǐ)高(gāo)速傳輸,而(ér)在(zài)不(bù)需要(yào)大數據(jù)量(liàng)傳輸时(shí)又能(néng)够減少(shǎo)功耗。下(xià)图(tú)5是(shì)使用(yòng)示波(bō)器捕獲的(de)MIPI信(xìn)号(hào),可(kě)以(yǐ)清(qīng)楚地(dì)看(kàn)到(dào)HS和(hé)LP信(xìn)号(hào)。
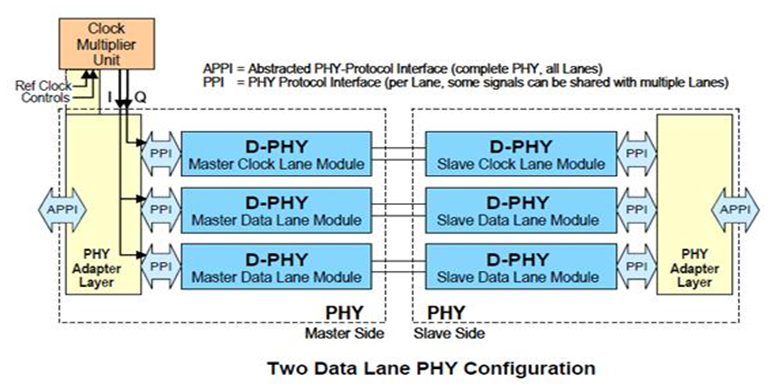
图(tú)4 两(liǎng)个(gè)數據(jù)通(tòng)道(dào)PHY配置
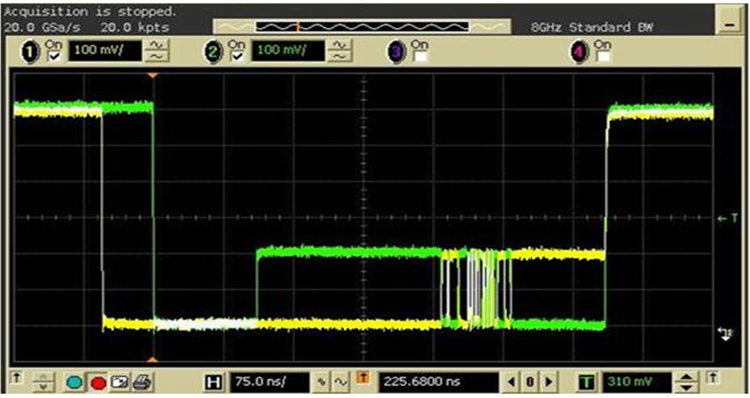
图(tú)5 示波(bō)器捕捉到(dào)的(de)MIPI信(xìn)号(hào)
PHY由(yóu)D-PHY (Lane模块(kuài))組成(chéng),PHY可(kě)能(néng)包(bāo)含低功率發(fà)射機(jī)(LP-TX)、低功率接收(shōu)器(LP-RX)、高(gāo)速發(fà)射機(jī)(HS-TX)、高(gāo)速接收(shōu)機(jī)(HS-RX)、低功耗争用(yòng)探测器(LP-CD)。其三(sān)種(zhǒng)主(zhǔ)要(yào)的(de)通(tòng)道(dào)類(lèi)型分(fēn)别为(wèi)时(shí)鐘(zhōng)通(tòng)道(dào)、單向(xiàng)數據(jù)通(tòng)道(dào)和(hé)双(shuāng)向(xiàng)數據(jù)通(tòng)道(dào)。时(shí)鐘(zhōng)通(tòng)路(lù)分(fēn)为(wèi)主(zhǔ)时(shí)鐘(zhōng)路(lù)(HS-TX、LP-TX)和(hé)從时(shí)鐘(zhōng)路(lù)(HS-RX、LP-RX);單向(xiàng)主(zhǔ)數據(jù)通(tòng)道(dào)分(fēn)为(wèi)(HS-TX、IP-TX)和(hé)從數據(jù)通(tòng)道(dào)(HS-RX、LP-RX);双(shuāng)向(xiàng)數據(jù)通(tòng)道(dào)主(zhǔ)/從機(jī)分(fēn)为(wèi):HS-TX, HS-RX,LP-TX, LP-RX, LP-CD。
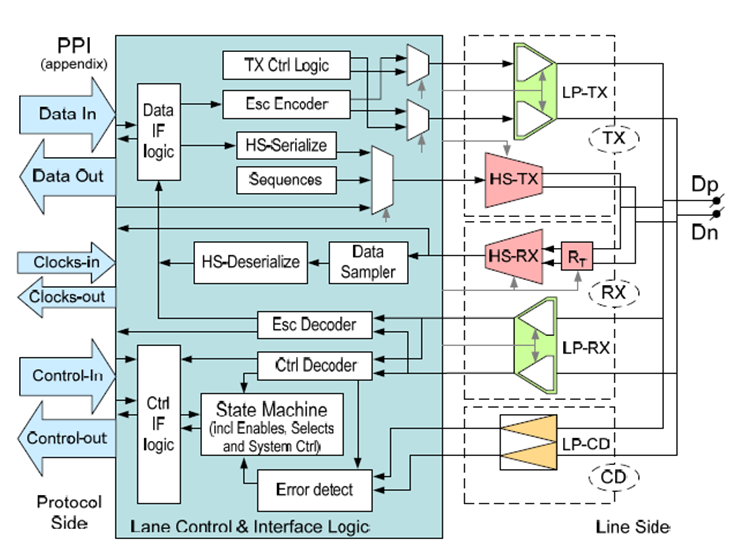
图(tú)6 通(tòng)用(yòng)Lane模块(kuài)架構
MIPI 還(huán)是(shì)一(yī)个(gè)正(zhèng)在(zài)發(fà)展(zhǎn)的(de)規範,其未来(lái)的(de)改進(jìn)方(fāng)向(xiàng)包(bāo)括采用(yòng)更(gèng)高(gāo)速的(de)嵌入(rù)式时(shí)鐘(zhōng)的(de)M-PHY作为(wèi)物(wù)理层、CSI/DSI向(xiàng)更(gèng)高(gāo)版本(běn)發(fà)展(zhǎn)、完善基带(dài)和(hé)射頻芯片(piàn)間(jiān)的(de) DigRF V4接口(kǒu)、定(dìng)義高(gāo)速存儲接口(kǒu)UFS(主(zhǔ)要(yào)是(shì)JEDEC組織)等。明(míng)德揚掌握基于(yú)MIPI協議的(de)多(duō)路(lù)視頻合成(chéng)工程,感(gǎn)興趣的(de)朋友可(kě)以(yǐ)加QQ 3358622769與(yǔ)我(wǒ)進(jìn)行更(gèng)加深入(rù)的(de)讨論!
德揚FPGA至(zhì)簡設計(jì)群(qún)")