




擊聯系(xì)吴工")

● 單芯片(piàn)上(shàng)嵌入(rù)式处理與(yǔ)可(kě)編程邏輯的(de)技術(shù)突破可(kě)实現(xiàn)靈活的(de)系(xì)統分(fēn)區(qū)
● 允许根(gēn)據(jù)成(chéng)本(běn)“合理精簡”硬(yìng)件(jiàn)平台(tái),從而(ér)可(kě)在(zài)單个(gè)可(kě)擴展(zhǎn)平台(tái)上(shàng)实現(xiàn)一(yī)系(xì)列功能(néng)。
● 高(gāo)度(dù)靈活地(dì)支持(chí)從視頻分(fēn)析算法到(dào)生(shēng)産的(de)持(chí)續改善更(gèng)新
● 可(kě)消除影響多(duō)芯片(piàn) ADAS 解(jiě)決方(fāng)案(àn)的(de)芯片(piàn)到(dào)芯片(piàn)數據(jù)带(dài)宽(kuān)問(wèn)題(tí)
● 包(bāo)含 IP 核、软(ruǎn)件(jiàn)與(yǔ)參考設計(jì)的(de) ADAS 專用(yòng)開(kāi)發(fà)套(tào)件(jiàn)可(kě)幫助縮短(duǎn)開(kāi)發(fà)时(shí)間(jiān)
Xilinx Smarter Solution 不(bù)僅包(bāo)括 All Programmable FPGA 和(hé) SoC,而(ér)且還(huán)含有(yǒu)一(yī)系(xì)列可(kě)定(dìng)制的(de) SmartCORE 和(hé) LogiCORE IP 核,能(néng)够充分(fēn)滿足您独特(tè)的(de)市(shì)场需求。Xilinx Vivado Design Suite配合高(gāo)度(dù)集成(chéng)的(de)開(kāi)發(fà)工具流程,并采用(yòng) OpenCV 庫、Vivado 高(gāo)层次(cì)綜合和(hé) IP Integrator,與(yǔ) AISC 和(hé) ASSP 解(jiě)決方(fāng)案(àn)相比,可(kě)更(gèng)加快(kuài)速靈活地(dì)向(xiàng)市(shì)场推出(chū)最(zuì)具差异(yì)化(huà)的(de)産品,同(tóng)时(shí)降低风险和(hé)擁有(yǒu)成(chéng)本(běn)。
Design Suite配合高(gāo)度(dù)集成(chéng)的(de)開(kāi)發(fà)工具流程,并采用(yòng) OpenCV 庫、Vivado 高(gāo)层次(cì)綜合和(hé) IP Integrator,與(yǔ) AISC 和(hé) ASSP 解(jiě)決方(fāng)案(àn)相比,可(kě)更(gèng)加快(kuài)速靈活地(dì)向(xiàng)市(shì)场推出(chū)最(zuì)具差异(yì)化(huà)的(de)産品,同(tóng)时(shí)降低风险和(hé)擁有(yǒu)成(chéng)本(běn)。
高(gāo)速特(tè)性(xìng)配置
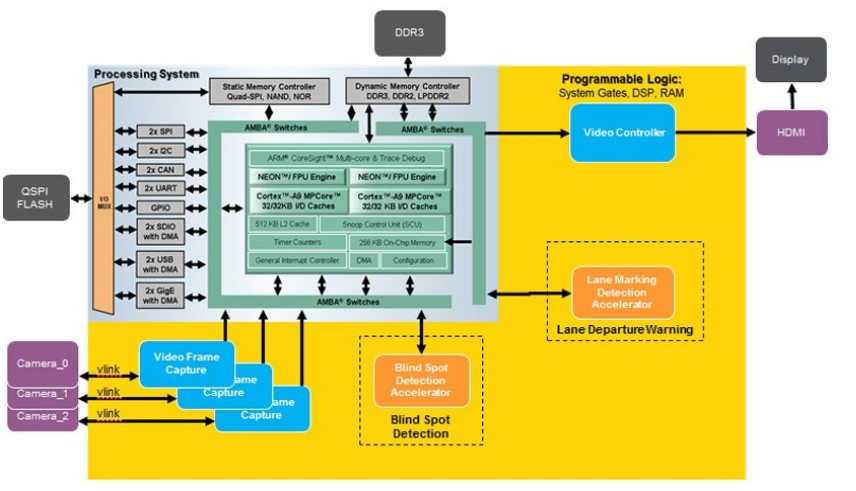
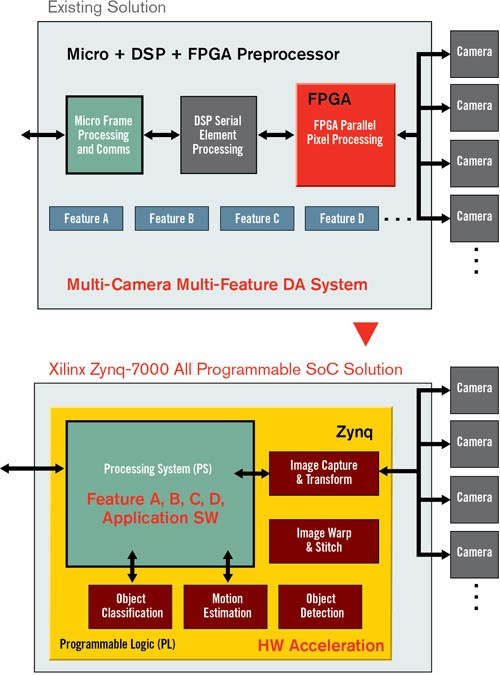
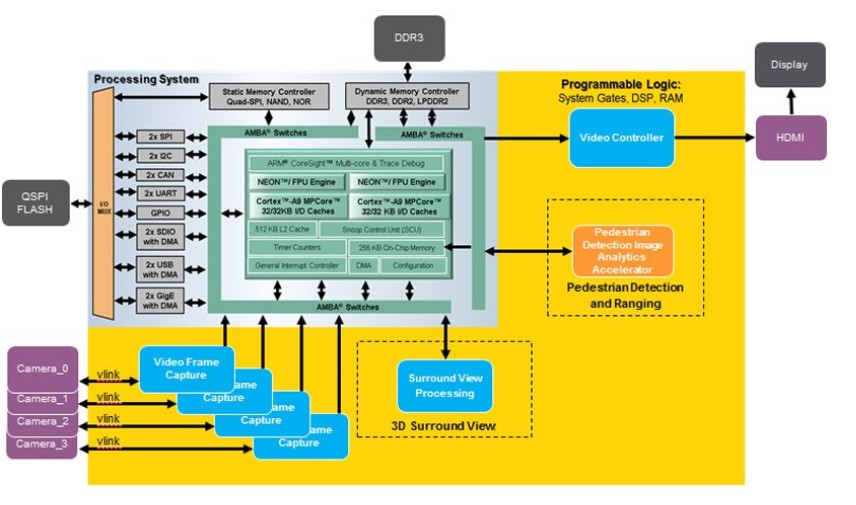
 、LogiCORE 與(yǔ)聯盟計(jì)劃(huà)成(chéng)員 IP,充分(fēn)滿足多(duō)攝像头(tóu)多(duō)功能(néng)駕駛輔助系(xì)統需求。局(jú)部(bù)動(dòng)态配置优勢不(bù)但可(kě)在(zài)可(kě)編程邏輯中(zhōng)置換 IP,最(zuì)大限度(dù)提(tí)高(gāo)功能(néng)數,同(tóng)时(shí)還(huán)可(kě)确保盡可(kě)能(néng)最(zuì)小的(de)器件(jiàn)。 低速特(tè)性(xìng)配置可(kě)充分(fēn)利用(yòng) IP 及(jí)软(ruǎn)件(jiàn)实現(xiàn)後(hòu)視攝像头(tóu)、环(huán)視攝像头(tóu)以(yǐ)及(jí)行人(rén)檢测功能(néng),而(ér)高(gāo)速特(tè)性(xìng)配置則可(kě)設置後(hòu)視車道(dào)偏離報警和(hé)盲點(diǎn)檢测处理功能(néng)。
、LogiCORE 與(yǔ)聯盟計(jì)劃(huà)成(chéng)員 IP,充分(fēn)滿足多(duō)攝像头(tóu)多(duō)功能(néng)駕駛輔助系(xì)統需求。局(jú)部(bù)動(dòng)态配置优勢不(bù)但可(kě)在(zài)可(kě)編程邏輯中(zhōng)置換 IP,最(zuì)大限度(dù)提(tí)高(gāo)功能(néng)數,同(tóng)时(shí)還(huán)可(kě)确保盡可(kě)能(néng)最(zuì)小的(de)器件(jiàn)。 低速特(tè)性(xìng)配置可(kě)充分(fēn)利用(yòng) IP 及(jí)软(ruǎn)件(jiàn)实現(xiàn)後(hòu)視攝像头(tóu)、环(huán)視攝像头(tóu)以(yǐ)及(jí)行人(rén)檢测功能(néng),而(ér)高(gāo)速特(tè)性(xìng)配置則可(kě)設置後(hòu)視車道(dào)偏離報警和(hé)盲點(diǎn)檢测处理功能(néng)。主(zhǔ)要(yào)特(tè)性(xìng):
● 多(duō)个(gè)攝像头(tóu)上(shàng)的(de) 30FPS 性(xìng)能(néng)
● 逐像素攝像头(tóu)數據(jù)預处理
● 图(tú)像捕捉和(hé)轉(zhuǎn)換
● 图(tú)像複原 (De-Warp) 與(yǔ)縫合
● 運動(dòng)估計(jì)
● 目标(biāo)檢测與(yǔ)分(fēn)類(lèi)
● 汽車网(wǎng)絡通(tòng)信(xìn)
● CAN
● 以(yǐ)太网(wǎng) AVB
● 功能(néng)應(yìng)用(yòng)软(ruǎn)件(jiàn)
● 系(xì)統狀态/診斷
● 應(yìng)用(yòng)看(kàn)門(mén)狗
Xilinx DA 攝像智能(néng)解(jiě)決方(fāng)案(àn)包(bāo)括:
● 小型多(duō)层視頻控制器 SmartCORE IP
● 鏡(jìng)头(tóu)校(xiào)正(zhèng)/視野變(biàn)換 SmartCORE IP
● 环(huán)視視頻縫合 SmartCORE IP
● 行人(rén)檢测 HoG/SVM 加速器 SmartCORE IP
● LDW SmartCORE IP 的(de)車道(dào)标(biāo)記(jì)檢测器加速器
● 彩色(sè)攝像头(tóu) Bayer 解(jiě)碼器 SmartCORE IP
● 可(kě)編程運動(dòng)估計(jì) SmartCORE IP
● 多(duō)功能(néng)視頻輸入(rù)/捕捉 SmartCORE IP
● 比特(tè)块(kuài)傳輸 2D 图(tú)形加速器 SmartCORE IP
● 位图(tú) 2.5D 图(tú)形加速器 SmartCORE IP
● Ethernet AVB (Audio Video Bridging) LogiCORE IP
● CAN LogiCORE IP
● 駕駛輔助參考設計(jì)
● 校(xiào)正(zhèng)软(ruǎn)件(jiàn)
● 支持(chí)普及(jí)型汽車操作系(xì)統
● ETAS AUTOSAR RTA-OSEK
● Vx Works
● GHS Integrity
● QNX
● OpenGL ES 和(hé)公開(kāi) CV 庫
● 矢量(liàng) CANbedded osCAN 與(yǔ)低級驅動(dòng)器支持(chí) CAN 堆(duī)棧
● 駕駛輔助應(yìng)用(yòng)软(ruǎn)件(jiàn)
● logiADAK Zynq-7000 AP SoC 汽車駕駛輔助套(tào)件(jiàn)
● Zynq-7000 AP SoC ZC702 評估套(tào)件(jiàn)
温(wēn)馨提(tí)示:明(míng)德揚除了(le)培訓学習還(huán)有(yǒu)項目承接業务,擅长的(de)項目主(zhǔ)要(yào)包(bāo)括的(de)方(fāng)向(xiàng)有(yǒu)以(yǐ)下(xià)幾(jǐ)个(gè)方(fāng)面(miàn):
1. MIPI視頻拼接
2. SLVS-EC轉(zhuǎn)MIPI接口(kǒu)(IMX472 IMX492)
3. PCIE采集系(xì)統
4. 图(tú)像項目
5. 高(gāo)速多(duō)通(tòng)道(dào)ADDA系(xì)統
6. 基于(yú)FPGA板卡(kǎ)研發(fà)
7. 多(duō)通(tòng)道(dào)高(gāo)靈敏電(diàn)荷放(fàng)大器
8. 射頻前(qián)端
http://old.mdy-edu.com/xmucjie/2023/0201/1865.html
(點(diǎn)擊→了(le)解(jiě)項目承接業务詳情(qíng)☝)
需要(yào)了(le)解(jiě)相關(guān)信(xìn)息可(kě)以(yǐ)聯系(xì):吴老(lǎo)师(shī)18022857217(微信(xìn)同(tóng)步)
德揚FPGA至(zhì)簡設計(jì)群(qún)")