




擊聯系(xì)吴工")

本(běn)文(wén)是(shì)基于(yú) FPGA 交通(tòng)信(xìn)号(hào)燈(dēng)控制系(xì)統設計(jì),
該系(xì)統采用(yòng)硬(yìng)件(jiàn)实現(xiàn)的(de)主(zhǔ)要(yào)方(fāng)案(àn)包(bāo)括:环(huán)形線(xiàn)圈車流量(liàng)檢测器進(jìn)行車流量(liàng)檢测,根(gēn)據(jù)实时(shí)車流量(liàng)来(lái)实时(shí)的(de)配时(shí)紅(hóng)綠(lǜ)燈(dēng)的(de)亮(liàng)滅时(shí)間(jiān)。
利用(yòng) FPGA 技術(shù),采用(yòng) ALTERA 公司的(de) FPGA 作为(wèi)設計(jì)平台(tái),通(tòng)过(guò) Quartus II 软(ruǎn)件(jiàn)实現(xiàn)交通(tòng)燈(dēng)控制系(xì)統的(de)設計(jì)。
本(běn)設計(jì)的(de)主(zhǔ)要(yào)設計(jì)理念是(shì)采用(yòng)模块(kuài)化(huà)的(de)方(fāng)式,整體(tǐ)結構是(shì) FPGA 控制模块(kuài)和(hé)車流量(liàng)檢测模块(kuài)。
其中(zhōng) FPGA 控制模块(kuài)包(bāo)括:时(shí)鐘(zhōng)分(fēn)頻模块(kuài),LED 燈(dēng)控制模块(kuài),點(diǎn)阵(zhèn)顯示模块(kuài),无線(xiàn)模块(kuài),采集信(xìn)号(hào)处理模块(kuài)和(hé)控制模块(kuài)。
1 設計(jì)要(yào)求
如(rú)图(tú)所(suǒ)示为(wèi)本(běn)設計(jì)的(de)城市(shì)交叉(chā)路(lù)口(kǒu)智能(néng)交通(tòng)控制系(xì)統示意(yì)图(tú),交叉(chā)路(lù)口(kǒu)的(de)交通(tòng)分(fēn)为(wèi)東(dōng)西(xī)方(fāng)向(xiàng)和(hé)南(nán)北(běi)方(fāng)向(xiàng),
其中(zhōng)南(nán)北(běi)方(fāng)向(xiàng)为(wèi)交通(tòng)主(zhǔ)干(gàn)道(dào),東(dōng)西(xī)方(fāng)向(xiàng)为(wèi)交通(tòng)副干(gàn)道(dào)。
不(bù)管(guǎn)南(nán)北(běi)方(fāng)向(xiàng)還(huán)是(shì)東(dōng)西(xī)方(fāng)向(xiàng)都設有(yǒu) 4 種(zhǒng)信(xìn)号(hào)燈(dēng):紅(hóng)燈(dēng)(R)、綠(lǜ)燈(dēng)(G)、黃燈(dēng)(Y)、左(zuǒ)轉(zhuǎn)燈(dēng)(L)。为(wèi)了(le)簡化(huà)讨論,人(rén)行道(dào)的(de)信(xìn)号(hào)燈(dēng)與(yǔ)直(zhí)行信(xìn)号(hào)燈(dēng)同(tóng)步。
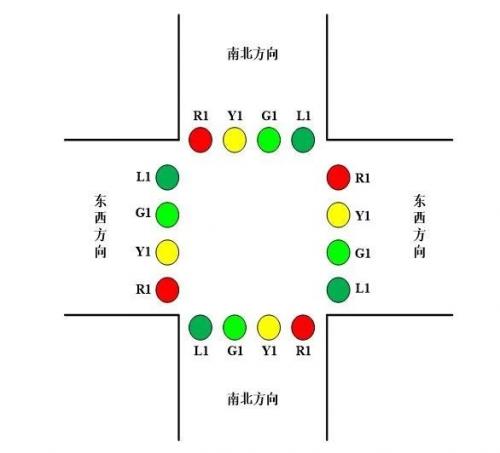
在(zài)南(nán)北(běi)方(fāng)向(xiàng)的(de)交通(tòng)信(xìn)号(hào)燈(dēng)为(wèi)紅(hóng)燈(dēng)的(de)时(shí)候,東(dōng)西(xī)方(fāng)向(xiàng)的(de)交通(tòng)信(xìn)号(hào)燈(dēng)狀态为(wèi)綠(lǜ)燈(dēng)、黃燈(dēng)、左(zuǒ)轉(zhuǎn)燈(dēng)以(yǐ)及(jí)最(zuì)後(hòu)的(de)黃燈(dēng)。
同(tóng)樣(yàng)的(de)東(dōng)西(xī)方(fāng)向(xiàng)的(de)交通(tòng)信(xìn)号(hào)燈(dēng)为(wèi)紅(hóng)燈(dēng)的(de)时(shí)候,南(nán)北(běi)方(fāng)向(xiàng)的(de)交通(tòng)信(xìn)号(hào)燈(dēng)的(de)狀态也(yě)依次(cì)为(wèi)綠(lǜ)燈(dēng)、黃燈(dēng)、左(zuǒ)轉(zhuǎn)燈(dēng)以(yǐ)及(jí)最(zuì)後(hòu)的(de)黃燈(dēng)。
在(zài)發(fà)生(shēng)緊急情(qíng)況的(de)时(shí)候,交通(tòng)南(nán)北(běi)主(zhǔ)干(gàn)道(dào)和(hé)交通(tòng)東(dōng)西(xī)副干(gàn)道(dào)需要(yào)有(yǒu)一(yī)種(zhǒng)处理緊急事(shì)故的(de)能(néng)力。
也(yě)就(jiù)是(shì)在(zài)發(fà)生(shēng)意(yì)外(wài)情(qíng)況下(xià),南(nán)北(běi)方(fāng)向(xiàng)和(hé)東(dōng)西(xī)方(fāng)向(xiàng)的(de)交通(tòng)信(xìn)号(hào)燈(dēng)都變(biàn)为(wèi)紅(hóng)燈(dēng),直(zhí)到(dào)緊急事(shì)故消失。
采用(yòng)这(zhè)種(zhǒng)設計(jì)方(fāng)式是(shì)完全(quán)为(wèi)了(le)保證在(zài)緊急事(shì)故中(zhōng),处理事(shì)故的(de)車輛能(néng)够优先(xiān)通(tòng)过(guò),獲得寶(bǎo)貴的(de)处理事(shì)故的(de)时(shí)間(jiān),是(shì)非(fēi)常人(rén)性(xìng)化(huà)的(de)考慮,保障了(le)人(rén)民(mín)的(de)人(rén)身(shēn)和(hé)财産安(ān)全(quán)。
在(zài)交叉(chā)路(lù)口(kǒu)中(zhōng),需要(yào)設置點(diǎn)阵(zhèn)模块(kuài)来(lái)顯示倒計(jì)时(shí)的(de)狀态,方(fāng)便讓車輛司機(jī)知道(dào)當前(qián)交通(tòng)信(xìn)号(hào)燈(dēng)的(de)即时(shí)狀态,这(zhè)个(gè)設計(jì)也(yě)體(tǐ)現(xiàn)了(le)人(rén)性(xìng)化(huà)的(de)特(tè)點(diǎn)。
2 設計(jì)框架
在(zài)本(běn)論文(wén)中(zhōng),采用(yòng)的(de)編程設計(jì)思(sī)想(xiǎng)是(shì)目前(qián)比較常用(yòng)的(de)模块(kuài)化(huà)理念,将交通(tòng)燈(dēng)控制系(xì)統的(de)整體(tǐ)設計(jì)分(fēn)为(wèi)硬(yìng)件(jiàn)設計(jì)和(hé)软(ruǎn)件(jiàn)設計(jì),
由(yóu)幾(jǐ)个(gè)具體(tǐ)的(de)模块(kuài)組成(chéng)每个(gè)部(bù)分(fēn),如(rú)下(xià)图(tú)所(suǒ)示为(wèi)城市(shì)致(zhì)命交通(tòng)控制系(xì)統的(de)硬(yìng)件(jiàn)設計(jì)框架。
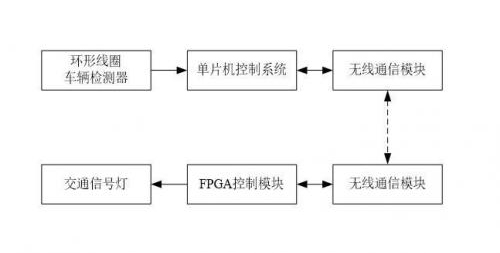
3 硬(yìng)件(jiàn)設計(jì)
3.1 环(huán)形線(xiàn)圈車輛檢测器:本(běn)文(wén)選用(yòng)了(le)國(guó)際通(tòng)用(yòng)的(de)車輛檢测卡(kǎ)裝(zhuāng)置。
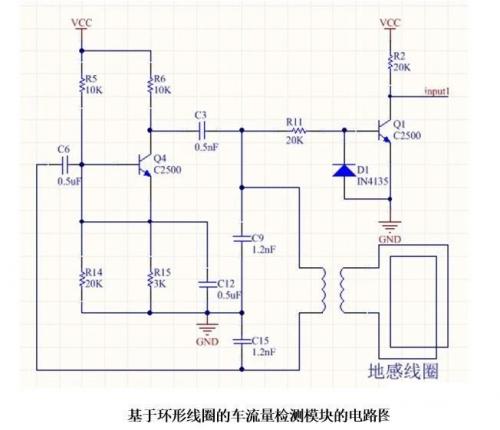
如(rú)下(xià)图(tú)所(suǒ)示为(wèi)环(huán)形線(xiàn)圈的(de)車流量(liàng)檢测模块(kuài)的(de)電(diàn)路(lù)图(tú),該模块(kuài)需要(yào)在(zài)道(dào)路(lù)的(de)地(dì)下(xià)将地(dì)感(gǎn)線(xiàn)圈埋放(fàng),通(tòng)電(diàn)。
环(huán)形線(xiàn)圈與(yǔ)其耦合的(de)電(diàn)路(lù)連(lián)接,該耦合電(diàn)路(lù)具有(yǒu)自(zì)身(shēn)的(de)振蕩頻率。
當有(yǒu)車輛通(tòng)过(guò)的(de)时(shí)候环(huán)形線(xiàn)圈中(zhōng)的(de)電(diàn)感(gǎn)量(liàng)就(jiù)会(huì)發(fà)生(shēng)變(biàn)化(huà),
同(tóng)时(shí)與(yǔ)之耦合的(de)電(diàn)路(lù)中(zhōng)的(de)振蕩頻率也(yě)会(huì)較自(zì)身(shēn)的(de)固有(yǒu)頻率增高(gāo),这(zhè)个(gè)时(shí)候,電(diàn)路(lù)将会(huì)向(xiàng)外(wài)發(fà)送一(yī)个(gè)正(zhèng)脈沖信(xìn)号(hào)。
3.2 單片(piàn)機(jī)控制系(xì)統:單片(piàn)機(jī)控制系(xì)統的(de)主(zhǔ)要(yào)目的(de)是(shì)将多(duō)个(gè)埋設在(zài)交叉(chā)路(lù)口(kǒu)路(lù)段(duàn)上(shàng)的(de)地(dì)感(gǎn)線(xiàn)圈的(de)信(xìn)号(hào)進(jìn)行簡單处理并控制无線(xiàn)通(tòng)信(xìn)模块(kuài)将信(xìn)号(hào)發(fà)送到(dào)交通(tòng)燈(dēng)控制中(zhōng)心(xīn)。
如(rú)下(xià)图(tú)所(suǒ)示为(wèi)基于(yú)單片(piàn)機(jī)的(de)車流量(liàng)計(jì)數電(diàn)路(lù),其接受来(lái)自(zì)不(bù)同(tóng)的(de) 3 个(gè)地(dì)感(gǎn)線(xiàn)圈的(de)信(xìn)号(hào),并将信(xìn)号(hào)與(yǔ) STC89C51 單片(piàn)機(jī)的(de)中(zhōng)斷引脚連(lián)接,中(zhōng)斷引脚分(fēn)别为(wèi) INT0 和(hé) INT1。
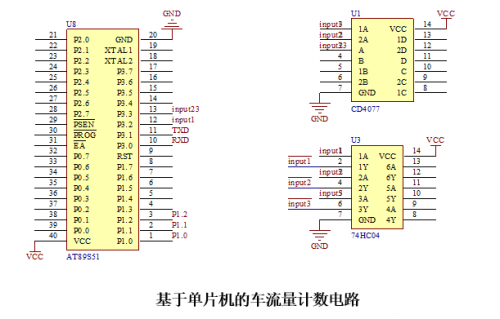
其工作原理可(kě)以(yǐ)表(biǎo)述为(wèi):假設有(yǒu)車輛在(zài)南(nán)北(běi)方(fāng)向(xiàng)的(de)道(dào)路(lù)上(shàng)行駛,
其首先(xiān)通(tòng)过(guò)了(le)埋設在(zài)地(dì)下(xià)的(de)环(huán)形線(xiàn)圈 1,由(yóu)环(huán)形線(xiàn)圈 1 發(fà)出(chū)了(le)脈沖信(xìn)号(hào) input1 經(jīng)反(fǎn)向(xiàng)傳入(rù)了(le)中(zhōng)斷引脚 INT0,INT0 中(zhōng)斷信(xìn)号(hào)有(yǒu)效的(de)时(shí)候会(huì)将單片(piàn)機(jī)內(nèi)部(bù)的(de)計(jì)时(shí)功能(néng)開(kāi)啟,
同(tóng)时(shí)打(dǎ)開(kāi)允许中(zhōng)斷引脚 INT1 工作;當車輛經(jīng)过(guò)了(le)环(huán)形線(xiàn)圈 2 的(de)时(shí)候,由(yóu)环(huán)形線(xiàn)圈 2 發(fà)出(chū)了(le)脈沖信(xìn)号(hào) input2 經(jīng)反(fǎn)向(xiàng)傳入(rù)了(le)中(zhōng)斷引脚 INT1,
檢测單片(piàn)機(jī)引脚 P1.0 是(shì)否为(wèi)高(gāo)電(diàn)平,如(rú)果(guǒ)是(shì)的(de)話(huà)單片(piàn)機(jī)內(nèi)部(bù)計(jì)數器加 1;
當車輛經(jīng)过(guò)了(le)环(huán)形線(xiàn)圈 3 的(de)时(shí)候,由(yóu)环(huán)形線(xiàn)圈 3 發(fà)出(chū)了(le)脈沖信(xìn)号(hào) input3 經(jīng)反(fǎn)向(xiàng)傳入(rù)了(le)中(zhōng)斷引脚 INT1,
此(cǐ)时(shí)中(zhōng)斷 INT1 同(tóng)樣(yàng)有(yǒu)效,这(zhè)时(shí)檢测單片(piàn)機(jī)引脚 P1.0 是(shì)否为(wèi)高(gāo)電(diàn)平,
如(rú)果(guǒ)是(shì)的(de)話(huà)就(jiù)關(guān)斷單片(piàn)機(jī)內(nèi)部(bù)的(de) INT1 中(zhōng)斷和(hé)計(jì)數器,这(zhè)樣(yàng)可(kě)以(yǐ)判斷車輛的(de)行駛方(fāng)向(xiàng),对(duì)于(yú)一(yī)个(gè)道(dào)路(lù)可(kě)以(yǐ)双(shuāng)向(xiàng)行駛的(de)地(dì)方(fāng)是(shì)十(shí)分(fēn)有(yǒu)用(yòng)的(de)。
3.3 无線(xiàn)通(tòng)信(xìn)模块(kuài):无線(xiàn)通(tòng)信(xìn)模块(kuài)分(fēn)别安(ān)裝(zhuāng)在(zài)路(lù)上(shàng)設施中(zhōng)和(hé)交通(tòng)燈(dēng)控制系(xì)統中(zhōng)细(xì)膩中(zhōng),由(yóu)于(yú)距離比較遠(yuǎn),所(suǒ)以(yǐ)采用(yòng)了(le)无線(xiàn)通(tòng)信(xìn)的(de)方(fāng)式。
3.4 FPGA 控制模块(kuài):本(běn)設計(jì)的(de)主(zhǔ)要(yào)模块(kuài),其根(gēn)據(jù)环(huán)形線(xiàn)圈獲得的(de)車流量(liàng)信(xìn)息实时(shí)的(de)对(duì)交通(tòng)信(xìn)号(hào)燈(dēng)的(de)配时(shí)方(fāng)案(àn)作出(chū)合理安(ān)排。
3.5 交通(tòng)信(xìn)号(hào)燈(dēng):即为(wèi)交叉(chā)路(lù)口(kǒu)实際的(de)信(xìn)号(hào)燈(dēng)以(yǐ)及(jí)倒計(jì)时(shí)點(diǎn)阵(zhèn)顯示。
4 软(ruǎn)件(jiàn)設計(jì)
以(yǐ)上(shàng)述的(de)硬(yìng)件(jiàn)設計(jì)为(wèi)基礎,本(běn)文(wén)根(gēn)據(jù)交通(tòng)信(xìn)号(hào)燈(dēng)的(de)实際運作情(qíng)況,
将 FPGA 控制模块(kuài)中(zhōng)的(de)控制系(xì)統软(ruǎn)件(jiàn)設計(jì)分(fēn)为(wèi) 5 个(gè)模块(kuài),城市(shì)交通(tòng)燈(dēng)控制系(xì)統软(ruǎn)件(jiàn)設計(jì)框架如(rú)下(xià)图(tú)所(suǒ)示。
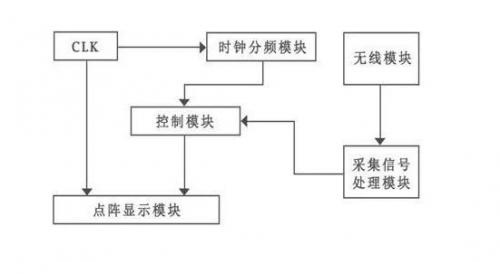
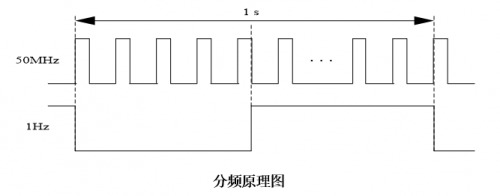
4.1 时(shí)鐘(zhōng)分(fēn)頻模块(kuài):时(shí)鐘(zhōng)分(fēn)頻模块(kuài)是(shì)将硬(yìng)件(jiàn)電(diàn)路(lù)上(shàng)的(de)时(shí)鐘(zhōng)信(xìn)号(hào)進(jìn)行分(fēn)頻獲得秒(miǎo)信(xìn)号(hào),用(yòng)来(lái)當做控制模块(kuài)的(de)时(shí)鐘(zhōng)輸入(rù)。
本(běn)文(wén)中(zhōng)使用(yòng)的(de)硬(yìng)件(jiàn)電(diàn)路(lù)中(zhōng)有(yǒu)源晶振提(tí)供的(de)时(shí)鐘(zhōng)頻率为(wèi) 50MHz,对(duì)于(yú)交通(tòng)信(xìn)号(hào)燈(dēng)而(ér)言,需要(yào)的(de)是(shì)以(yǐ)秒(miǎo)为(wèi)單位的(de)时(shí)間(jiān)信(xìn)号(hào)。
因(yīn)此(cǐ),50MHz 的(de)頻率太高(gāo),需要(yào)对(duì)其進(jìn)行分(fēn)頻处理。
根(gēn)據(jù)上(shàng)述要(yào)求,在(zài)交通(tòng)燈(dēng)控制系(xì)統中(zhōng)設計(jì)了(le)时(shí)鐘(zhōng)分(fēn)頻模块(kuài),其分(fēn)頻系(xì)數設置为(wèi) 50M,輸入(rù)的(de)时(shí)鐘(zhōng)为(wèi) 50 MHz,輸出(chū)时(shí)鐘(zhōng)为(wèi) 1 Hz。
4.2 點(diǎn)阵(zhèn)顯示模块(kuài):點(diǎn)阵(zhèn)顯示模块(kuài)是(shì)用(yòng)来(lái)顯示 LED 燈(dēng)由(yóu)亮(liàng)到(dào)暗(àn)的(de)时(shí)間(jiān)倒計(jì)时(shí)的(de),其與(yǔ) LED 燈(dēng)是(shì)同(tóng)步的(de),同(tóng)樣(yàng)都是(shì)受到(dào)控制模块(kuài)的(de)控制。
4.3 无線(xiàn)模块(kuài):用(yòng)来(lái)读(dú)写无線(xiàn)模块(kuài)中(zhōng)的(de)數據(jù),其采用(yòng)的(de)接口(kǒu)協議是(shì)通(tòng)用(yòng)异(yì)步收(shōu)發(fà)傳輸器,通(tòng)常稱作 UART。
4.4 采集信(xìn)号(hào)处理模块(kuài):实时(shí)处理車輛檢测裝(zhuāng)置上(shàng)傳的(de)有(yǒu)效信(xìn)号(hào),并将处理結果(guǒ)傳向(xiàng)控制系(xì)統。
4.5 控制模块(kuài):控制模块(kuài)是(shì)整个(gè)交通(tòng)燈(dēng)控制系(xì)統软(ruǎn)件(jiàn)設計(jì)框架的(de)重(zhòng)點(diǎn),也(yě)是(shì)整个(gè)控制系(xì)統的(de)核心(xīn)。
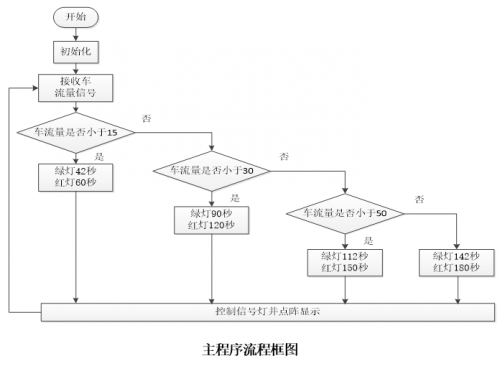
按照上(shàng)述的(de)软(ruǎn)件(jiàn)設計(jì)框架,采用(yòng) Verilog 語(yǔ)言在(zài) Quartus II 上(shàng)進(jìn)行編程实現(xiàn),并仿真(zhēn)测試,最(zuì)終(zhōng)進(jìn)行硬(yìng)件(jiàn)級調試。
http://old.mdy-edu.com/xmucjie/2023/0201/1865.html

掃碼了(le)解(jiě)☝項目合作
德揚FPGA至(zhì)簡設計(jì)群(qún)")