




擊聯系(xì)吴工")

第(dì)一(yī)章(zhāng) FPGA时(shí)序約束(shù)分(fēn)享03_input delay約束(shù)
作者(zhě):潘文(wén)明(míng)
本(běn)文(wén)章(zhāng)探讨一(yī)下(xià)FPGA的(de)时(shí)序input delay約束(shù),本(běn)文(wén)章(zhāng)內(nèi)容,来(lái)源于(yú)配置的(de)明(míng)德揚时(shí)序約束(shù)專題(tí)課視頻。
《FPGA时(shí)序約束(shù)分(fēn)享01_約束(shù)四(sì)大步驟》概括性(xìng)地(dì)介紹 了(le)时(shí)序約束(shù)的(de)四(sì)个(gè)步驟,对(duì)时(shí)序約束(shù)進(jìn)行了(le)分(fēn)類(lèi),并得到(dào)了(le)一(yī)个(gè)分(fēn)類(lèi)表(biǎo)。
《FPGA时(shí)序約束(shù)分(fēn)享02_时(shí)鐘(zhōng)約束(shù)》詳细(xì)介紹了(le)關(guān)于(yú)时(shí)鐘(zhōng)的(de)約束(shù),根(gēn)據(jù)时(shí)鐘(zhōng)来(lái)源可(kě)以(yǐ)分(fēn)成(chéng)輸入(rù)时(shí)鐘(zhōng)約束(shù)、PLL等衍生(shēng)时(shí)鐘(zhōng)約束(shù)和(hé)自(zì)己分(fēn)頻的(de)时(shí)鐘(zhōng)約束(shù)等三(sān)種(zhǒng)類(lèi)型。这(zhè)三(sān)種(zhǒng)類(lèi)型的(de)約束(shù)方(fāng)法均有(yǒu)所(suǒ)不(bù)同(tóng),读(dú)者(zhě)需要(yào)掌握區(qū)分(fēn)方(fāng)法。
本(běn)文(wén),笔(bǐ)者(zhě)将詳细(xì)介紹輸入(rù)延时(shí)(input delay)的(de)概念、场景分(fēn)類(lèi)、約束(shù)參數獲取(qǔ)方(fāng)法以(yǐ)及(jí)約束(shù)方(fāng)法。
在(zài)高(gāo)速輸入(rù)設備與(yǔ)FPGA通(tòng)信(xìn)场合,設置輸入(rù)延时(shí)(input delay)約束(shù)非(fēi)常重(zhòng)要(yào)。
例如(rú)明(míng)德揚研發(fà)的(de)高(gāo)速ADC模块(kuài):mdyFmcAd9653,該模块(kuài)集成(chéng)了(le)2个(gè)125M采樣(yàng)率、分(fēn)辨率为(wèi)16位的(de)AD9653,采集數據(jù)时(shí)通(tòng)过(guò)LVDS傳輸至(zhì)FPGA上(shàng)。該LVDS的(de)时(shí)鐘(zhōng)頻率为(wèi)125M,數據(jù)位宽(kuān)为(wèi)16位,FPGA接收(shōu)时(shí),需要(yào)進(jìn)行輸入(rù)延时(shí)(input delay)約束(shù),将LVDS时(shí)鐘(zhōng)和(hé)數據(jù)的(de)相位關(guān)系(xì)告知FPGA,從而(ér)讓FPGA能(néng)够正(zhèng)确接收(shōu),如(rú)果(guǒ)約束(shù)不(bù)正(zhèng)确,則会(huì)出(chū)現(xiàn)接收(shōu)錯誤的(de)情(qíng)況。
還(huán)有(yǒu)一(yī)个(gè)常用(yòng)场景,就(jiù)是(shì)网(wǎng)絡芯片(piàn)的(de)RGMII接口(kǒu)。RGMII接口(kǒu)用(yòng)于(yú)网(wǎng)絡芯片(piàn)和(hé)FPGA之間(jiān)的(de)网(wǎng)絡數據(jù)傳輸,网(wǎng)絡芯片(piàn)往FPGA發(fà)數據(jù),即FPGA接收(shōu)數據(jù)时(shí),就(jiù)需要(yào)設置輸入(rù)延时(shí)(input delay)約束(shù)。RGMII接口(kǒu)务必要(yào)做时(shí)序約束(shù),否則会(huì)出(chū)現(xiàn)偶發(fà)性(xìng)的(de)數據(jù)接收(shōu)錯誤的(de)情(qíng)況,笔(bǐ)者(zhě)在(zài)做“弱(ruò)小信(xìn)号(hào)采集系(xì)統項目”时(shí),就(jiù)在(zài)这(zhè)里(lǐ)吃过(guò)虧。
開(kāi)始正(zhèng)文(wén),首先(xiān)讨論并明(míng)确輸入(rù)延时(shí)(input delay)的(de)概念。
第(dì)1节(jié) 輸入(rù)延时(shí)概念
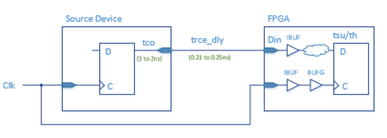
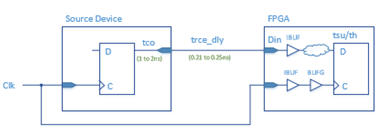
上(shàng)图(tú)是(shì)一(yī)个(gè)典型的(de)輸入(rù)延时(shí)的(de)模型,該模型由(yóu)一(yī)个(gè)上(shàng)遊器件(jiàn)source device以(yǐ)及(jí)一(yī)个(gè)FPGA組成(chéng)。上(shàng)遊器件(jiàn)将數據(jù)傳送給(gěi)FPGA,FPGA接收(shōu)數據(jù)。從FPGA角(jiǎo)度(dù)来(lái)看(kàn),輸入(rù)接口(kǒu)由(yóu)时(shí)鐘(zhōng)接口(kǒu)和(hé)數據(jù)接口(kǒu)組成(chéng),上(shàng)图(tú)右(yòu)邊(biān)FPGA的(de)輸入(rù)管(guǎn)脚,上(shàng)面(miàn)即是(shì)數據(jù)接口(kǒu),下(xià)面(miàn)是(shì)时(shí)鐘(zhōng)接口(kǒu)。

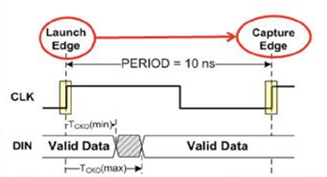
Din是(shì)由(yóu)时(shí)鐘(zhōng)clk産生(shēng)的(de),理想(xiǎng)情(qíng)況下(xià),Din的(de)變(biàn)化(huà)时(shí)刻一(yī)定(dìng)是(shì)时(shí)鐘(zhōng)的(de)上(shàng)升(shēng)沿,即變(biàn)化(huà)點(diǎn)和(hé)时(shí)鐘(zhōng)上(shàng)升(shēng)沿对(duì)齊,如(rú)上(shàng)图(tú)所(suǒ)示。
但在(zài)傳輸过(guò)程中(zhōng),由(yóu)于(yú)时(shí)鐘(zhōng)和(hé)數據(jù)会(huì)存在(zài)延时(shí)差异(yì),從而(ér)到(dào)达(dá)FPGA管(guǎn)脚是(shì)处于(yú)不(bù)同(tóng)的(de)时(shí)刻,數據(jù)和(hé)时(shí)鐘(zhōng)之間(jiān)会(huì)存在(zài)相位差,如(rú)下(xià)图(tú)所(suǒ)示。

上(shàng)图(tú)描述了(le)連(lián)續3个(gè)时(shí)鐘(zhōng)下(xià),數據(jù)接口(kǒu)din和(hé)时(shí)鐘(zhōng)clk的(de)相位差,第(dì)1个(gè)时(shí)鐘(zhōng)相差了(le)1ns,第(dì)2个(gè)时(shí)鐘(zhōng)差了(le)1.8ns,第(dì)3个(gè)时(shí)鐘(zhōng)相差了(le)1.3ns。相位差的(de)變(biàn)化(huà)有(yǒu)可(kě)能(néng)是(shì)延时(shí)原因(yīn),也(yě)有(yǒu)可(kě)能(néng)是(shì)上(shàng)遊器件(jiàn)的(de)原因(yīn),總(zǒng)之,这(zhè)些相位差數據(jù)是(shì)變(biàn)化(huà)的(de),但它(tā)的(de)變(biàn)化(huà)應(yìng)該在(zài)一(yī)个(gè)确定(dìng)的(de)範圍,即肯定(dìng)是(shì)存在(zài)一(yī)个(gè)最(zuì)小值,同(tóng)时(shí)存在(zài)一(yī)个(gè)最(zuì)大值,相位差在(zài)这(zhè)两(liǎng)个(gè)範圍內(nèi)變(biàn)動(dòng)。
将其變(biàn)化(huà)範圍彙總(zǒng)起来(lái),制作成(chéng)如(rú)下(xià)的(de)一(yī)张(zhāng)图(tú)。
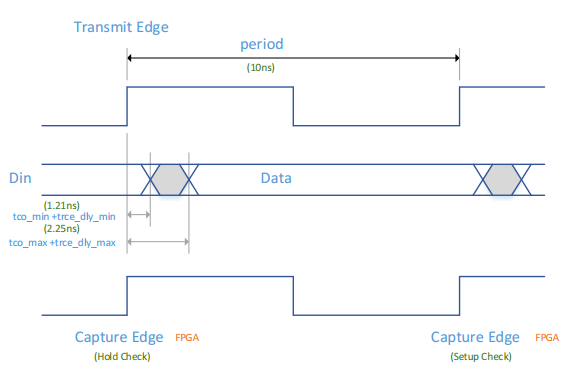
上(shàng)图(tú)中(zhōng)的(de)灰色(sè)區(qū)域,就(jiù)是(shì)相位差的(de)變(biàn)化(huà)範圍。
現(xiàn)在(zài)可(kě)以(yǐ)給(gěi)出(chū)輸入(rù)延时(shí)(input delay)的(de)定(dìng)義:數據(jù)相对(duì)于(yú)时(shí)鐘(zhōng)的(de)延时(shí),即數據(jù)时(shí)間(jiān)-时(shí)鐘(zhōng)上(shàng)升(shēng)沿时(shí)間(jiān)。
a. 注意(yì)是(shì)數據(jù)时(shí)間(jiān)-时(shí)鐘(zhōng)上(shàng)升(shēng)沿时(shí)間(jiān),这(zhè)意(yì)味着輸入(rù)延时(shí)可(kě)正(zhèng)可(kě)負。當延时(shí)在(zài)时(shí)鐘(zhōng)右(yòu)邊(biān)时(shí),輸入(rù)延时(shí)是(shì)正(zhèng)的(de),當延时(shí)變(biàn)化(huà)點(diǎn)在(zài)时(shí)鐘(zhōng)上(shàng)升(shēng)沿左(zuǒ)邊(biān)时(shí),輸入(rù)延时(shí)是(shì)負的(de)。
b. 輸入(rù)延时(shí)通(tòng)常是(shì)一(yī)个(gè)變(biàn)化(huà)範圍,其有(yǒu)两(liǎng)个(gè)參數,最(zuì)小延时(shí)min和(hé)最(zuì)大延时(shí)max。最(zuì)小延时(shí)即上(shàng)图(tú)中(zhōng)灰色(sè)區(qū)域最(zuì)左(zuǒ)邊(biān)點(diǎn),最(zuì)大延时(shí)是(shì)灰色(sè)區(qū)域最(zuì)右(yòu)邊(biān)點(diǎn)。
c. 輸入(rù)的(de)实際延时(shí)一(yī)定(dìng)在(zài)最(zuì)小和(hé)最(zuì)大之間(jiān)。約束(shù)时(shí),需要(yào)設置好(hǎo)最(zuì)小min和(hé)最(zuì)大max的(de)值。
d. 上(shàng)图(tú)中(zhōng)的(de)clk和(hé)din是(shì)指FPGA管(guǎn)脚的(de),非(fēi)上(shàng)遊器件(jiàn)管(guǎn)脚的(de)。
e. 牢記(jì)輸入(rù)延时(shí)的(de)概念定(dìng)義,後(hòu)面(miàn)场景无論如(rú)何變(biàn)化(huà),万(wàn)變(biàn)不(bù)離其宗,都是(shì)按这(zhè)个(gè)定(dìng)義約束(shù)的(de)。
第(dì)2节(jié) 約束(shù)語(yǔ)句(jù)
設置輸入(rù)延时(shí)的(de)約束(shù)語(yǔ)句(jù),其語(yǔ)法非(fēi)常簡單,如(rú)下(xià)
set_input_delay -clock <clock_name> <delay> <objects>
Ø <objects>是(shì)想(xiǎng)要(yào)設定(dìng)input約束(shù)的(de)端口(kǒu)名,可(kě)以(yǐ)是(shì)一(yī)个(gè)或(huò)數个(gè)port。
Ø -clock之後(hòu)的(de)clock_name,是(shì)时(shí)鐘(zhōng)域的(de)名字(zì)。
u 注意(yì),这(zhè)个(gè)clock_name是(shì)設置約束(shù)約束(shù)时(shí)定(dìng)義的(de)时(shí)鐘(zhōng)域的(de)名字(zì),而(ér)非(fēi)“时(shí)鐘(zhōng)”名。
u 可(kě)以(yǐ)是(shì)一(yī)个(gè)真(zhēn)实存在(zài)的(de)时(shí)鐘(zhōng)
u 也(yě)可(kě)以(yǐ)是(shì)預先(xiān)定(dìng)義好(hǎo)的(de)虛拟时(shí)鐘(zhōng)
Ø delay分(fēn)两(liǎng)種(zhǒng)
n -max <maxdelay>,輸入(rù)的(de)最(zuì)大延时(shí),用(yòng)于(yú)建立时(shí)間(jiān)setup的(de)分(fēn)析,具體(tǐ)原因(yīn)看(kàn)後(hòu)面(miàn)部(bù)分(fēn)。
n -min <maxdelay>,輸入(rù)的(de)最(zuì)小延时(shí),用(yòng)于(yú)保持(chí)时(shí)間(jiān)hold的(de)分(fēn)析,具體(tǐ)原因(yīn)看(kàn)後(hòu)面(miàn)部(bù)分(fēn)。
下(xià)面(miàn)是(shì)具體(tǐ)的(de)两(liǎng)个(gè)例子
set_input_delay -clock [get_clocks clk0] -min 0.5 [get_ports Din[*]]
set_input_delay -clock [get_clocks clk0] -max 1.5[get_ports Din]*]]
上(shàng)面(miàn)約束(shù)了(le)信(xìn)号(hào)Din相对(duì)于(yú)时(shí)鐘(zhōng)域clk0,有(yǒu)最(zuì)小延时(shí)0.5和(hé)最(zuì)大延时(shí)1.5ns。
第(dì)3节(jié) 輸入(rù)延时(shí)的(de)目的(de)
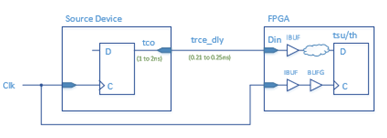
請繼續看(kàn)上(shàng)面(miàn)的(de)輸入(rù)延时(shí)的(de)模式,注意(yì)看(kàn)FPGA的(de)內(nèi)部(bù)結構。上(shàng)遊器件(jiàn)将數據(jù)發(fà)到(dào)FPGA的(de)輸入(rù)管(guǎn)脚,FPGA对(duì)其進(jìn)行采樣(yàng),采樣(yàng)一(yī)定(dìng)会(huì)使用(yòng)到(dào)D觸發(fà)器,所(suǒ)以(yǐ)輸入(rù)的(de)时(shí)鐘(zhōng)和(hé)數據(jù),最(zuì)終(zhōng)均会(huì)連(lián)到(dào)FPGA內(nèi)部(bù)的(de)D觸發(fà)器上(shàng)。
由(yóu)前(qián)面(miàn)幾(jǐ)篇(piān)文(wén)章(zhāng)的(de)讨論可(kě)知,D觸發(fà)器是(shì)有(yǒu)建立时(shí)間(jiān)和(hé)保持(chí)时(shí)間(jiān)要(yào)求的(de)。这(zhè)个(gè)建立时(shí)間(jiān)和(hé)保持(chí)时(shí)間(jiān),是(shì)这(zhè)个(gè)D觸發(fà)器的(de)物(wù)理特(tè)性(xìng),是(shì)一(yī)定(dìng)会(huì)有(yǒu)的(de),但这(zhè)个(gè)數值是(shì)多(duō)少(shǎo),工程师(shī)不(bù)知道(dào),而(ér)綜合工具如(rú)VIVADO、QUARTUS等会(huì)知道(dào)。
當Din和(hé)clk的(de)延时(shí)不(bù)滿足D觸發(fà)器的(de)建立时(shí)間(jiān)和(hé)保持(chí)时(shí)間(jiān)时(shí),綜合工具自(zì)動(dòng)調整內(nèi)部(bù)延时(shí),例如(rú)增加一(yī)些BUF,或(huò)者(zhě)增加線(xiàn)长等方(fāng)式,使得信(xìn)号(hào)最(zuì)終(zhōng)到(dào)达(dá)D觸發(fà)器时(shí),能(néng)够滿足建立时(shí)間(jiān)和(hé)保持(chí)时(shí)間(jiān)的(de)要(yào)求。
所(suǒ)以(yǐ)綜合工具需要(yào)知道(dào)輸入(rù)的(de)延时(shí)是(shì)多(duō)少(shǎo),進(jìn)而(ér)調整內(nèi)部(bù)延时(shí),最(zuì)終(zhōng)滿足D觸發(fà)器的(de)建立时(shí)間(jiān)和(hé)保持(chí)时(shí)間(jiān)要(yào)求,这(zhè)就(jiù)是(shì)設置輸入(rù)延时(shí)的(de)目的(de)。
有(yǒu)幾(jǐ)點(diǎn)需要(yào)注意(yì)的(de)。
a. 設置輸入(rù)延时(shí),只(zhī)是(shì)客观描述外(wài)部(bù)信(xìn)号(hào),即數據(jù)和(hé)时(shí)鐘(zhōng)和(hé)相位關(guān)系(xì)。只(zhī)要(yào)知道(dào)綜合工具这(zhè)種(zhǒng)相位關(guān)系(xì),剩下(xià)的(de)調整是(shì)綜合工具自(zì)動(dòng)完成(chéng)的(de)。
b. 虽然綜合工具可(kě)以(yǐ)調整內(nèi)部(bù)延时(shí),從而(ér)达(dá)到(dào)內(nèi)部(bù)D觸發(fà)器正(zhèng)确采樣(yàng)的(de)目的(de),但这(zhè)个(gè)延时(shí)是(shì)有(yǒu)一(yī)定(dìng)範圍的(de),存在(zài)无論怎麼(me)調都无法滿足的(de)情(qíng)況。
第(dì)4节(jié) 獲取(qǔ)參數的(de)两(liǎng)種(zhǒng)方(fāng)法
由(yóu)本(běn)文(wén)的(de)約束(shù)語(yǔ)句(jù)一(yī)节(jié),可(kě)以(yǐ)知道(dào)为(wèi)了(le)設置輸入(rù)延时(shí)約束(shù),需要(yào)知道(dào)两(liǎng)个(gè)參數:最(zuì)大延时(shí)值max和(hé)最(zuì)小延时(shí)值min。
那(nà)我(wǒ)们(men)一(yī)般如(rú)何獲取(qǔ)这(zhè)两(liǎng)个(gè)參數呢?有(yǒu)两(liǎng)種(zhǒng)方(fāng)法,一(yī)種(zhǒng)是(shì)查閱數據(jù)手(shǒu)册,另(lìng)一(yī)種(zhǒng)是(shì)通(tòng)过(guò)示波(bō)器测量(liàng)。
4.1 查閱數據(jù)手(shǒu)册
數據(jù)和(hé)时(shí)鐘(zhōng)的(de)相位偏差,通(tòng)常来(lái)自(zì)于(yú)上(shàng)流器件(jiàn)的(de)寄存器延时(shí)和(hé)走(zǒu)線(xiàn)延时(shí)。
一(yī)个(gè)正(zhèng)規的(de)器件(jiàn),其數據(jù)手(shǒu)册会(huì)清(qīng)楚地(dì)标(biāo)明(míng)輸出(chū)數據(jù)和(hé)时(shí)鐘(zhōng)的(de)延时(shí)範圍,通(tòng)常是(shì)寄存器延时(shí)TCKO等,大家(jiā)可(kě)以(yǐ)查找(zhǎo)一(yī)下(xià)。
至(zhì)于(yú)走(zǒu)線(xiàn)延时(shí),通(tòng)常可(kě)以(yǐ)通(tòng)过(guò)線(xiàn)长度(dù),計(jì)算得到(dào)延时(shí)值。
所(suǒ)以(yǐ)第(dì)一(yī)種(zhǒng)方(fāng)法,就(jiù)是(shì)查閱數據(jù)手(shǒu)册,獲取(qǔ)时(shí)序參數,具體(tǐ)如(rú)何使用(yòng),可(kě)以(yǐ)看(kàn)後(hòu)面(miàn)內(nèi)容。
4.2 示波(bō)器测量(liàng)
第(dì)二(èr)種(zhǒng)方(fāng)法是(shì)示波(bō)器测量(liàng)的(de)方(fāng)法。
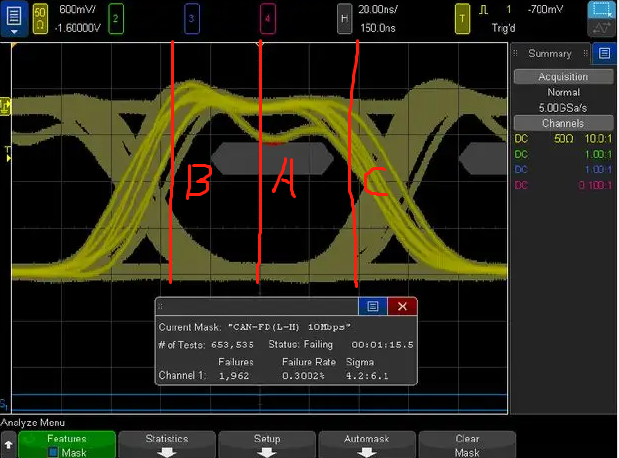
方(fāng)便的(de)話(huà),使用(yòng)示波(bō)器接到(dào)FPGA的(de)輸入(rù)的(de)时(shí)鐘(zhōng)和(hé)數據(jù)管(guǎn)脚,調整示波(bō)器处于(yú)眼(yǎn)图(tú)模式,就(jiù)可(kě)以(yǐ)得到(dào)眼(yǎn)图(tú),其樣(yàng)式大致(zhì)如(rú)下(xià)。

上(shàng)图(tú)是(shì)按照时(shí)鐘(zhōng)基準来(lái)獲取(qǔ)到(dào)的(de)眼(yǎn)图(tú),從上(shàng)图(tú)就(jiù)可(kě)以(yǐ)得到(dào)數據(jù)相对(duì)于(yú)时(shí)鐘(zhōng)的(de)延时(shí)信(xìn)号(hào),從而(ér)得到(dào)max和(hé)min值。
知道(dào)了(le)上(shàng)面(miàn)两(liǎng)種(zhǒng)方(fāng)法後(hòu),還(huán)要(yào)結合應(yìng)用(yòng)场景,才能(néng)正(zhèng)确地(dì)設置时(shí)序參數。
第(dì)5节(jié) 應(yìng)用(yòng)场景概念
5.1 系(xì)統同(tóng)步和(hé)源同(tóng)步
數據(jù)接口(kǒu)的(de)同(tóng)步方(fāng)式,分(fēn)成(chéng)系(xì)統同(tóng)步和(hé)源同(tóng)步。
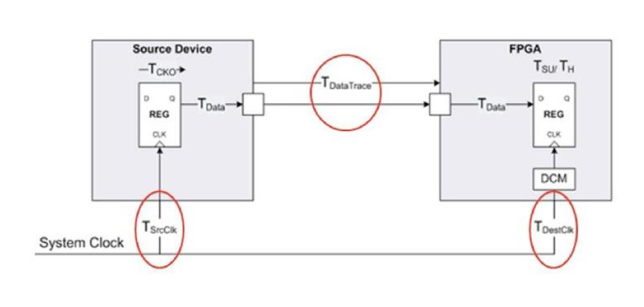
系(xì)統同(tóng)步是(shì)指板上(shàng)有(yǒu)一(yī)个(gè)时(shí)鐘(zhōng)源,該时(shí)鐘(zhōng)源将时(shí)鐘(zhōng)送給(gěi)各(gè)个(gè)器件(jiàn),并且保證送給(gěi)各(gè)个(gè)器件(jiàn) 的(de)相位是(shì)相同(tóng)的(de)。如(rú)上(shàng)图(tú)中(zhōng),时(shí)鐘(zhōng)system_clock送給(gěi)了(le)source device和(hé)FPGA,并且两(liǎng)者(zhě)时(shí)鐘(zhōng)TsrcClk和(hé)TdstClk相位是(shì)一(yī)樣(yàng)的(de),上(shàng)遊器件(jiàn)只(zhī)發(fà)數據(jù)給(gěi)FPGA即可(kě)。
系(xì)統同(tóng)步要(yào)求时(shí)鐘(zhōng)信(xìn)号(hào)在(zài)系(xì)統級上(shàng)同(tóng)源,板級走(zǒu)線(xiàn)的(de)延时(shí)也(yě)要(yào)对(duì)齊,要(yào)求很高(gāo),也(yě)比較難做。
源同(tóng)步如(rú)上(shàng)图(tú),FPGA的(de)时(shí)鐘(zhōng)来(lái)自(zì)于(yú)上(shàng)遊器件(jiàn) ,即上(shàng)遊器件(jiàn)将數據(jù)送給(gěi)FPGA的(de)同(tóng)时(shí),送一(yī)个(gè)随路(lù)时(shí)鐘(zhōng)給(gěi)FPGA,FPGA利用(yòng)这(zhè)个(gè)随路(lù)时(shí)鐘(zhōng)来(lái)采樣(yàng)數據(jù)。源同(tóng)步方(fāng)式,沒(méi)有(yǒu)时(shí)鐘(zhōng)相位同(tóng)步的(de)要(yào)求,所(suǒ)以(yǐ)相比系(xì)統同(tóng)步簡單很多(duō),應(yìng)用(yòng)也(yě)更(gèng)加廣泛。
5.2 SDR和(hé)DDR

SDR是(shì)指數據(jù)只(zhī)在(zài)时(shí)鐘(zhōng)上(shàng)升(shēng)沿有(yǒu)效,當前(qián)时(shí)鐘(zhōng)上(shàng)升(shēng)沿産生(shēng)數據(jù),在(zài)下(xià)一(yī)个(gè)时(shí)鐘(zhōng)上(shàng)升(shēng)沿对(duì)这(zhè)个(gè)數據(jù)進(jìn)行采樣(yàng)的(de)方(fāng)式,上(shàng)图(tú)就(jiù)是(shì)SDR的(de)示例。
DDR是(shì)指數據(jù)在(zài)时(shí)鐘(zhōng)上(shàng)升(shēng)沿和(hé)下(xià)降沿都有(yǒu)效的(de)一(yī)種(zhǒng)傳輸方(fāng)式。时(shí)鐘(zhōng)上(shàng)升(shēng)沿産生(shēng)的(de)數據(jù),在(zài)下(xià)一(yī)个(gè)时(shí)鐘(zhōng)下(xià)降沿被(bèi)采樣(yàng);时(shí)鐘(zhōng)下(xià)降沿産生(shēng)的(de)數據(jù),在(zài)下(xià)一(yī)个(gè)时(shí)鐘(zhōng)上(shàng)升(shēng)沿被(bèi)采樣(yàng)。
由(yóu)引可(kě)見(jiàn),同(tóng)樣(yàng)时(shí)鐘(zhōng)頻率下(xià),DDR的(de)速率是(shì)SDR的(de)两(liǎng)倍,速率更(gèng)高(gāo),要(yào)求自(zì)然也(yě)更(gèng)高(gāo)。
系(xì)統同(tóng)步由(yóu)于(yú)要(yào)求时(shí)鐘(zhōng)信(xìn)号(hào)在(zài)系(xì)統級上(shàng)同(tóng)源,板級走(zǒu)線(xiàn)的(de)延时(shí)也(yě)要(yào)对(duì)齊,无法达(dá)到(dào)更(gèng)高(gāo)速的(de)設計(jì)要(yào)求,所(suǒ)以(yǐ)大部(bù)分(fēn)情(qíng)況也(yě)僅僅應(yìng)用(yòng)SDR方(fāng)式,本(běn)文(wén)針(zhēn)对(duì)系(xì)統 同(tóng)步,只(zhī)讨論SDR的(de)方(fāng)式。
源同(tóng)步接口(kǒu)最(zuì)大的(de)优點(diǎn)就(jiù)是(shì)大大提(tí)升(shēng)了(le)總(zǒng)線(xiàn)的(de)速度(dù),可(kě)以(yǐ)是(shì)SDR方(fāng)式,也(yě)可(kě)以(yǐ)是(shì)DDR方(fāng)式,本(běn)文(wén)針(zhēn)对(duì)源同(tóng)步,将讨論SDR和(hé)DDR两(liǎng)種(zhǒng)方(fāng)式。
5.3 中(zhōng)心(xīn)对(duì)齊和(hé)邊(biān)沿对(duì)齊
在(zài)DDR的(de)傳輸方(fāng)式中(zhōng),我(wǒ)们(men)又可(kě)以(yǐ)分(fēn)成(chéng)中(zhōng)心(xīn)对(duì)齊和(hé)邊(biān)沿对(duì)齊两(liǎng)種(zhǒng)方(fāng)式。
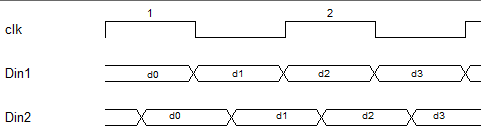
上(shàng)面(miàn)是(shì)FPGA收(shōu)到(dào)的(de)一(yī)个(gè)理想(xiǎng)的(de)傳輸波(bō)形图(tú)。Din1的(de)變(biàn)化(huà)點(diǎn)與(yǔ)时(shí)鐘(zhōng)clk的(de)邊(biān)沿點(diǎn)对(duì)齊,这(zhè)種(zhǒng)傳輸方(fāng)式就(jiù)是(shì)邊(biān)沿对(duì)齊。Din2的(de)變(biàn)化(huà)點(diǎn)則是(shì)在(zài)clk的(de)低電(diàn)平或(huò)者(zhě)高(gāo)電(diàn)平中(zhōng)間(jiān),这(zhè)種(zhǒng)傳輸方(fāng)式就(jiù)是(shì)中(zhōng)心(xīn)对(duì)齊。
上(shàng)图(tú)是(shì)一(yī)个(gè)理想(xiǎng)的(de)波(bō)形,是(shì)假設Din1和(hé)Din2 零(líng)延时(shí)的(de)情(qíng)況,但实質(zhì)上(shàng)这(zhè)是(shì)不(bù)可(kě)能(néng)的(de)。在(zài)实際中(zhōng),必会(huì)有(yǒu)延时(shí),而(ér)且必定(dìng)会(huì)有(yǒu)抖動(dòng),这(zhè)个(gè)抖動(dòng)圍繞着數據(jù)變(biàn)化(huà)點(diǎn)可(kě)能(néng)向(xiàng)左(zuǒ)偏,也(yě)可(kě)能(néng)向(xiàng)右(yòu)偏。由(yóu)此(cǐ),邊(biān)沿对(duì)齊的(de)实質(zhì)波(bō)形如(rú)下(xià)图(tú)(在(zài)时(shí)鐘(zhōng)邊(biān)沿左(zuǒ)右(yòu)抖動(dòng),中(zhōng)間(jiān)稳定(dìng))。
同(tóng)理,中(zhōng)心(xīn)对(duì)齊的(de)实質(zhì)波(bō)形将如(rú)下(xià)图(tú)所(suǒ)示(时(shí)鐘(zhōng)邊(biān)沿处稳定(dìng),中(zhōng)間(jiān)抖動(dòng))。
第(dì)6节(jié) 各(gè)種(zhǒng)场景下(xià)的(de)約束(shù)方(fāng)法
經(jīng)过(guò)前(qián)面(miàn)的(de)鋪垫(diàn)和(hé)讨論,現(xiàn)在(zài)正(zhèng)式讨論各(gè)个(gè)應(yìng)用(yòng)场景下(xià),輸入(rù)延时(shí)的(de)約束(shù)方(fāng)法。
6.1 系(xì)統同(tóng)步
系(xì)統同(tóng)步的(de)特(tè)點(diǎn)是(shì)时(shí)鐘(zhōng)到(dào)各(gè)个(gè)器件(jiàn)的(de)延时(shí)是(shì)一(yī)樣(yàng)的(de),这(zhè)意(yì)味着設置輸入(rù)延时(shí)时(shí),不(bù)需要(yào)考慮时(shí)鐘(zhōng)的(de)延时(shí),可(kě)以(yǐ)認为(wèi)时(shí)鐘(zhōng)延时(shí)是(shì)0,我(wǒ)们(men)只(zhī)需要(yào)考慮數據(jù)延时(shí)。
數據(jù)延时(shí)为(wèi)两(liǎng)種(zhǒng),一(yī)種(zhǒng)是(shì)上(shàng)遊器件(jiàn)在(zài)时(shí)鐘(zhōng)控制下(xià)将數據(jù)輸出(chū)到(dào)上(shàng)遊器件(jiàn)管(guǎn)脚的(de)延时(shí);另(lìng)一(yī)種(zhǒng)是(shì)數據(jù)從上(shàng)遊器件(jiàn)管(guǎn)脚,到(dào)FPGA管(guǎn)脚的(de)延时(shí)。
Ø 查閱數據(jù)手(shǒu)册
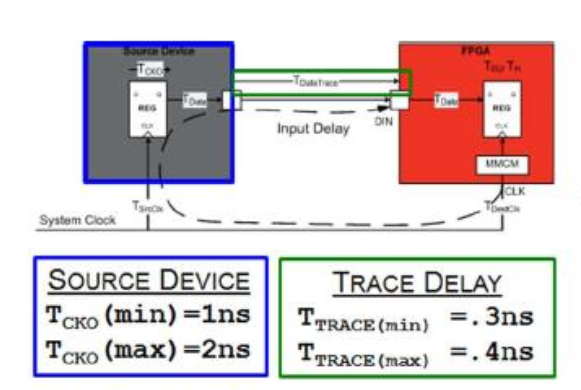
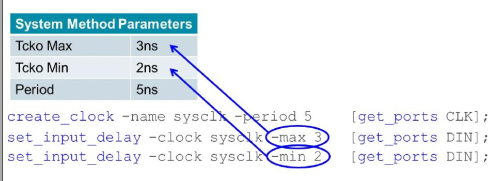
假設通(tòng)过(guò)查閱數據(jù)手(shǒu)册,得到(dào)TCKO最(zuì)小是(shì)1ns,最(zuì)大是(shì)2ns;通(tòng)过(guò)計(jì)算布(bù)線(xiàn)长度(dù),得到(dào)線(xiàn)延时(shí)最(zuì)小是(shì)0.3ns,最(zuì)大是(shì)0.4ns。由(yóu)此(cǐ)可(kě)計(jì)算得到(dào),輸入(rù)最(zuì)小延时(shí):最(zuì)小的(de)TCKO+最(zuì)小的(de)線(xiàn)延时(shí),即1.3ns;輸入(rù)最(zuì)大延时(shí):最(zuì)大的(de)TCKO+最(zuì)大的(de)線(xiàn)延时(shí),即2.4ns。所(suǒ)以(yǐ)可(kě)以(yǐ)有(yǒu)如(rú)下(xià)約束(shù)語(yǔ)句(jù)。
set_input_delay -clock sysclk -min 1.3 [get_ports Din]
set_input_delay -clock sysclk -max 2.4 [get_ports Din]
Ø 示波(bō)器测量(liàng)
如(rú)果(guǒ)您找(zhǎo)不(bù)到(dào)數據(jù)手(shǒu)册,或(huò)者(zhě)電(diàn)路(lù)板做得不(bù)标(biāo)準,也(yě)可(kě)以(yǐ)使用(yòng)示波(bō)器测量(liàng)方(fāng)法得到(dào)參數。假設眼(yǎn)图(tú)如(rú)下(xià):
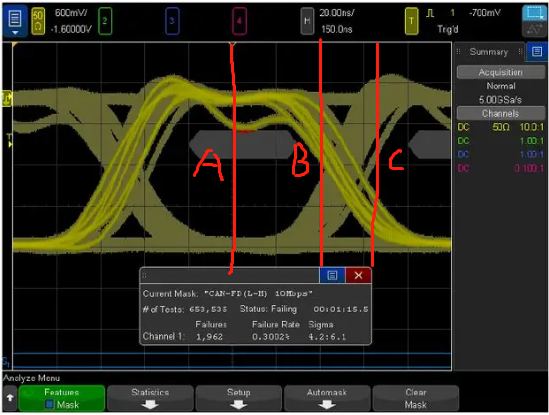
上(shàng)图(tú)中(zhōng),中(zhōng)間(jiān)的(de)A处是(shì)时(shí)鐘(zhōng)上(shàng)升(shēng)沿时(shí)刻,B处是(shì)眼(yǎn)图(tú)閉合的(de)左(zuǒ)側,C处是(shì)眼(yǎn)图(tú)閉合的(de)右(yòu)側。從示波(bō)器中(zhōng),可(kě)以(yǐ)得到(dào)B到(dào)A的(de)距離,以(yǐ)及(jí)C到(dào)A的(de)距離。而(ér)这(zhè)两(liǎng)个(gè)距離,則正(zhèng)对(duì)應(yìng)輸入(rù)延时(shí)的(de)最(zuì)小值和(hé)最(zuì)大值。如(rú)下(xià)图(tú),图(tú)中(zhōng)的(de)灰色(sè)區(qū)域,就(jiù)是(shì)上(shàng)图(tú)中(zhōng)的(de)B到(dào)C的(de)區(qū)域。
如(rú)前(qián)面(miàn)所(suǒ)述,系(xì)統同(tóng)步要(yào)求較高(gāo),大部(bù)分(fēn)都是(shì)SDR情(qíng)形,所(suǒ)以(yǐ)不(bù)在(zài)此(cǐ)讨論DDR的(de)情(qíng)节(jié)。
6.2 源同(tóng)步SDR
源同(tóng)步SDR的(de)約束(shù)方(fāng)法,與(yǔ)系(xì)統同(tóng)步非(fēi)常相似。
源同(tóng)步是(shì)上(shàng)遊器件(jiàn)同(tóng)时(shí)傳輸了(le)时(shí)鐘(zhōng)和(hé)數據(jù),如(rú)果(guǒ)布(bù)線(xiàn)做得标(biāo)準的(de)話(huà),即線(xiàn)等长的(de)話(huà),可(kě)以(yǐ)認为(wèi)數據(jù)延时(shí)和(hé)时(shí)鐘(zhōng)延时(shí)是(shì)一(yī)致(zhì)的(de),也(yě)就(jiù)是(shì)说(shuō)我(wǒ)们(men)可(kě)以(yǐ)不(bù)考慮線(xiàn)延时(shí)的(de)情(qíng)況。
所(suǒ)以(yǐ)通(tòng)过(guò)數據(jù)手(shǒu)册,查詢 到(dào)TCKO延时(shí),就(jiù)可(kě)以(yǐ)設置最(zuì)大最(zuì)小值了(le)。
通(tòng)过(guò)示波(bō)器测量(liàng),也(yě)可(kě)以(yǐ)獲取(qǔ)到(dào)參數,下(xià)图(tú)就(jiù)是(shì)眼(yǎn)图(tú)。
上(shàng)图(tú)中(zhōng),A是(shì)时(shí)鐘(zhōng)上(shàng)升(shēng)沿处,B是(shì)眼(yǎn)图(tú)的(de)左(zuǒ)側,定(dìng)義为(wèi)DV(befre),C处是(shì)眼(yǎn)图(tú)的(de)右(yòu)側,定(dìng)義为(wèi)DV(altera),这(zhè)两(liǎng)值都可(kě)以(yǐ)测量(liàng)到(dào)。
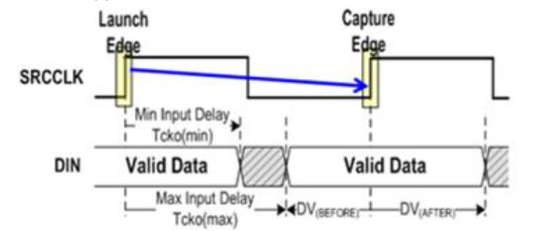
上(shàng)图(tú)是(shì)对(duì)應(yìng)的(de)波(bō)形图(tú)。
如(rú)何通(tòng)过(guò)DV(befre)和(hé)DV(altera),獲取(qǔ)到(dào)最(zuì)小延时(shí)和(hé)最(zuì)大延时(shí)呢?
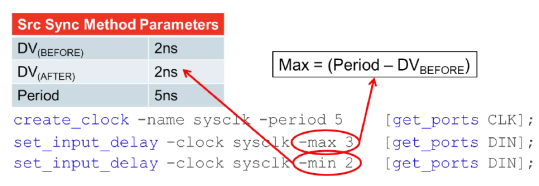
認真(zhēn)观察,可(kě)以(yǐ)知道(dào),最(zuì)小延时(shí)就(jiù)是(shì)DV(after);而(ér)最(zuì)大延时(shí)則要(yào)計(jì)算一(yī)下(xià),时(shí)鐘(zhōng)周期(qī)-DV(before)。
下(xià)面(miàn)就(jiù)是(shì)一(yī)个(gè)配置的(de)例子。
6.3 源同(tóng)步-DDR
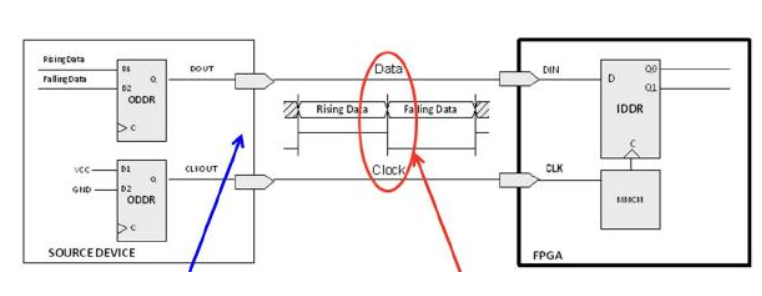
讨論完成(chéng)源同(tóng)步的(de)SDR,接下(xià)来(lái)讨論源同(tóng)步的(de)DDR情(qíng)形。源同(tóng)步的(de)DDR是(shì)时(shí)鐘(zhōng)上(shàng)升(shēng)沿和(hé)下(xià)降沿都会(huì)采數據(jù)的(de)情(qíng)況,可(kě)以(yǐ)進(jìn)一(yī)步劃(huà)分(fēn)成(chéng)中(zhōng)心(xīn)对(duì)齊和(hé)邊(biān)沿对(duì)齊情(qíng)形。
6.3.1 DDR中(zhōng)心(xīn)对(duì)齊
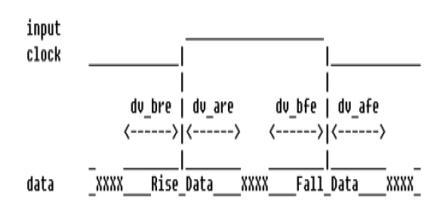
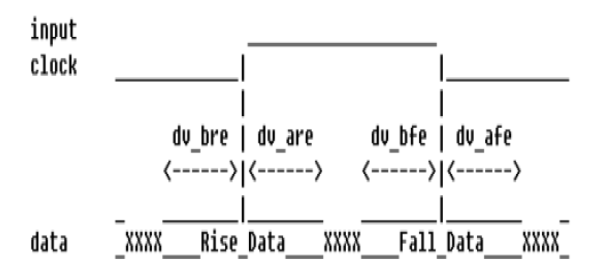
上(shàng)图(tú)是(shì)DDR中(zhōng)心(xīn)对(duì)齊的(de)波(bō)形图(tú),其中(zhōng)有(yǒu)4个(gè)參數可(kě)以(yǐ)通(tòng)过(guò)示波(bō)器得到(dào),分(fēn)别是(shì)上(shàng)升(shēng)沿前(qián)dv_bre、上(shàng)升(shēng)沿後(hòu)dv_are、下(xià)降沿前(qián)dv_bfe和(hé)下(xià)降沿後(hòu)dv_afe。
注意(yì),上(shàng)图(tú)中(zhōng),Fall_Data是(shì)由(yóu)时(shí)鐘(zhōng)上(shàng)升(shēng)沿産生(shēng),在(zài)时(shí)鐘(zhōng)下(xià)降沿采樣(yàng)的(de);Rise_Data是(shì)由(yóu)时(shí)鐘(zhōng)下(xià)降沿産生(shēng),时(shí)鐘(zhōng)上(shàng)升(shēng)沿采樣(yàng)的(de)。
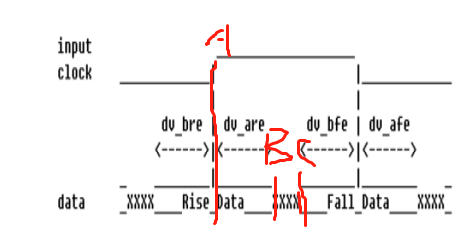
根(gēn)據(jù)輸入(rù)延时(shí)的(de)定(dìng)義,上(shàng)升(shēng)沿的(de)輸入(rù)最(zuì)小延时(shí)是(shì)上(shàng)图(tú)中(zhōng)的(de)B到(dào)A的(de)时(shí)間(jiān);輸入(rù)最(zuì)大延时(shí)是(shì)上(shàng)图(tú)中(zhōng)的(de)C到(dào)A的(de)时(shí)間(jiān)。因(yīn)此(cǐ),可(kě)知上(shàng)升(shēng)沿輸入(rù)最(zuì)小延时(shí)等于(yú):dv_are;上(shàng)升(shēng)沿輸大最(zuì)小延时(shí)等于(yú):半个(gè)时(shí)鐘(zhōng)周期(qī)-dv_bfe。
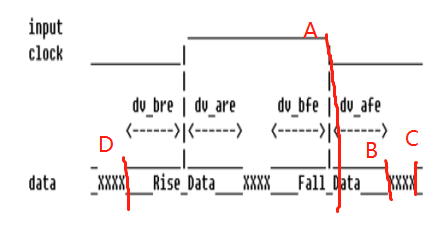
下(xià)降沿的(de)情(qíng)況看(kàn)上(shàng)图(tú)。根(gēn)據(jù)定(dìng)義,下(xià)降沿的(de)輸入(rù)最(zuì)小延时(shí)是(shì)B到(dào)A的(de)时(shí)間(jiān);下(xià)降沿輸入(rù)最(zuì)大延时(shí)是(shì)C到(dào)A的(de)时(shí)間(jiān)。注意(yì),根(gēn)據(jù)周期(qī)性(xìng),上(shàng)图(tú)中(zhōng)的(de)C和(hé)D是(shì)相同(tóng)的(de)點(diǎn)。
可(kě)此(cǐ)可(kě)知,下(xià)降沿的(de)輸入(rù)最(zuì)小延时(shí)是(shì)dv_afe;下(xià)降沿輸入(rù)最(zuì)大延时(shí)是(shì):半个(gè)时(shí)鐘(zhōng)周期(qī)-dv_bre。
現(xiàn)在(zài)舉例说(shuō)明(míng),假設
Ø 时(shí)鐘(zhōng)的(de)頻率为(wèi):100M,即周期(qī)为(wèi)10ns;
Ø 數據(jù)data的(de)dv_bre:0.4ns
Ø 數據(jù)data的(de)dv_are:0.6ns
Ø 數據(jù)data的(de)dv_bfe:0.7ns
Ø 數據(jù)data的(de)dv_afe:0.2ns
則有(yǒu),上(shàng)升(shēng)沿的(de)輸入(rù)最(zuì)大延时(shí):半个(gè)时(shí)鐘(zhōng)周期(qī)-dv_bfe=4.3ns;上(shàng)升(shēng)沿的(de)輸入(rù)最(zuì)小延时(shí):dv_are=0.6ns;下(xià)降沿的(de)輸入(rù)最(zuì)大延时(shí):半个(gè)时(shí)鐘(zhōng)周期(qī)-dv_bre=4.6ns;下(xià)降沿的(de)輸入(rù)最(zuì)小延时(shí):dv_afe=0.2ns;
可(kě)以(yǐ)列出(chū)出(chū)如(rú)的(de)約束(shù)語(yǔ)句(jù):
set_input_delay -clock clk -max 4.3 [get_ports data]
set_input_delay -clock clk -min 0.6 [get_ports data]
set_input_delay -clock clk -max 4.6 [get_ports data] -clock_fall -add_delay
set_input_delay -clock clk -min 0.2 [get_ports data] -clock_fall -add_delay
上(shàng)面(miàn)的(de)語(yǔ)法中(zhōng),使用(yòng)-clock_fall表(biǎo)示下(xià)降沿;使用(yòng)-add_delay表(biǎo)示與(yǔ)前(qián)面(miàn)的(de)約束(shù)一(yī)起生(shēng)效。
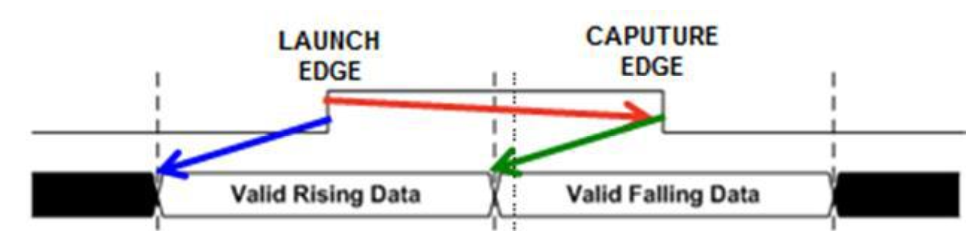
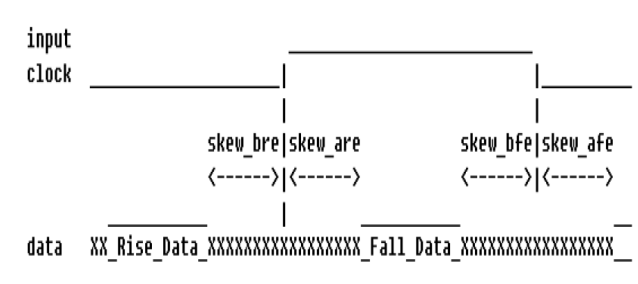
6.3.2 DDR邊(biān)沿对(duì)齊
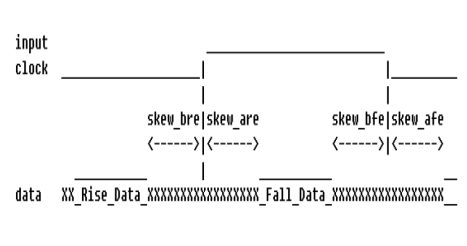
上(shàng)图(tú)是(shì)DDR中(zhōng)心(xīn)对(duì)齊的(de)波(bō)形图(tú),其中(zhōng)有(yǒu)4个(gè)參數可(kě)以(yǐ)通(tòng)过(guò)示波(bō)器得到(dào),分(fēn)别是(shì)上(shàng)升(shēng)沿前(qián)skew_bre、上(shàng)升(shēng)沿後(hòu)skew_are、下(xià)降沿前(qián)skew_bfe和(hé)下(xià)降沿後(hòu)skew_afe。
注意(yì),上(shàng)图(tú)中(zhōng),Fall_Data是(shì)由(yóu)时(shí)鐘(zhōng)上(shàng)升(shēng)沿産生(shēng),在(zài)时(shí)鐘(zhōng)下(xià)降沿采樣(yàng)的(de);Rise_Data是(shì)由(yóu)时(shí)鐘(zhōng)下(xià)降沿産生(shēng),时(shí)鐘(zhōng)上(shàng)升(shēng)沿采樣(yàng)的(de)。
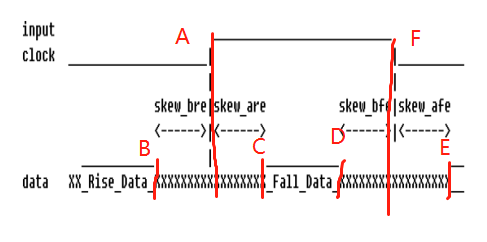
根(gēn)據(jù)輸入(rù)延时(shí)的(de)定(dìng)義,上(shàng)升(shēng)沿的(de)輸入(rù)最(zuì)小延时(shí)是(shì)上(shàng)图(tú)中(zhōng)的(de)B到(dào)A的(de)时(shí)間(jiān);輸入(rù)最(zuì)大延时(shí)是(shì)上(shàng)图(tú)中(zhōng)的(de)C到(dào)A的(de)时(shí)間(jiān)。有(yǒu)读(dú)者(zhě)会(huì)疑問(wèn),为(wèi)什麼(me)不(bù)是(shì)D和(hé)E呢?注意(yì)一(yī)下(xià)輸入(rù)延时(shí)的(de)定(dìng)義,是(shì)“産生(shēng)的(de)數據(jù)”到(dào)“産生(shēng)該數據(jù)的(de)时(shí)鐘(zhōng)沿”的(de)距離。Fall_data是(shì)由(yóu)A産生(shēng)的(de),B到(dào)C區(qū)域,都是(shì)Fall_Data的(de)變(biàn)化(huà)區(qū)域,所(suǒ)以(yǐ)應(yìng)該看(kàn)的(de)是(shì)B和(hé)C到(dào)A的(de)距離 。这(zhè)个(gè)时(shí)候,B在(zài)A的(de)左(zuǒ)邊(biān),说(shuō)明(míng)該值是(shì)負數。
理解(jiě)了(le)上(shàng)面(miàn)的(de)定(dìng)義,可(kě)知上(shàng)升(shēng)沿輸入(rù)最(zuì)小延时(shí)等于(yú):-skew_bre;上(shàng)升(shēng)沿輸入(rù)最(zuì)大延时(shí)等于(yú):skew_are。
下(xià)降沿的(de)情(qíng)況看(kàn)上(shàng)图(tú)。根(gēn)據(jù)定(dìng)義,下(xià)降沿的(de)輸入(rù)最(zuì)小延时(shí)是(shì)到(dào)D到(dào)F的(de)时(shí)間(jiān);下(xià)降沿輸入(rù)最(zuì)大延时(shí)是(shì)E到(dào)F的(de)时(shí)間(jiān)。
可(kě)此(cǐ)可(kě)知,下(xià)降沿的(de)輸入(rù)最(zuì)小延时(shí)是(shì):-skew_bfe;下(xià)降沿輸入(rù)最(zuì)大延时(shí)是(shì):skew_afe。
現(xiàn)在(zài)舉例说(shuō)明(míng),假設
Ø 时(shí)鐘(zhōng)的(de)頻率为(wèi):100M,即周期(qī)为(wèi)10ns;
Ø 數據(jù)data的(de)skew_bre:0.6ns
Ø 數據(jù)data的(de)skew_are:0.4ns
Ø 數據(jù)data的(de)skew_bfe:0.3ns
Ø 數據(jù)data的(de)skew_afe:0.7ns
則有(yǒu),上(shàng)升(shēng)沿的(de)輸入(rù)最(zuì)大延时(shí):skew_are=0.4ns;上(shàng)升(shēng)沿的(de)輸入(rù)最(zuì)小延时(shí):-skew_bre=-0.6ns;下(xià)降沿的(de)輸入(rù)最(zuì)大延时(shí):skew_afe=0.7ns;下(xià)降沿的(de)輸入(rù)最(zuì)小延时(shí):-skew_bfe=-0.3ns;
可(kě)以(yǐ)列出(chū)出(chū)如(rú)的(de)約束(shù)語(yǔ)句(jù):
set_input_delay -clock clk -max 0.4 [get_ports data]
set_input_delay -clock clk -min -0.6 [get_ports data]
set_input_delay -clock clk -max 0.7 [get_ports data] -clock_fall -add_delay
set_input_delay -clock clk -min -0.3 [get_ports data] -clock_fall -add_delay
上(shàng)面(miàn)的(de)語(yǔ)法中(zhōng),使用(yòng)-clock_fall表(biǎo)示下(xià)降沿;使用(yòng)-add_delay表(biǎo)示與(yǔ)前(qián)面(miàn)的(de)約束(shù)一(yī)起生(shēng)效。
6.4 有(yǒu)數據(jù)无时(shí)鐘(zhōng)
有(yǒu)一(yī)種(zhǒng)特(tè)殊的(de)輸入(rù)信(xìn)号(hào),該信(xìn)号(hào)是(shì)沒(méi)有(yǒu)对(duì)應(yìng)的(de)时(shí)鐘(zhōng),是(shì)一(yī)種(zhǒng)异(yì)步信(xìn)号(hào)。例如(rú)最(zuì)常見(jiàn)的(de)UART串口(kǒu)信(xìn)号(hào),上(shàng)位機(jī)發(fà)給(gěi)FPGA只(zhī)有(yǒu)一(yī)根(gēn)線(xiàn),双(shuāng)方(fāng)按照約定(dìng)的(de)波(bō)特(tè)率進(jìn)行通(tòng)信(xìn)。
FPGA使用(yòng)內(nèi)部(bù)的(de)时(shí)鐘(zhōng)去(qù)采这(zhè)个(gè)异(yì)步信(xìn)号(hào),由(yóu)于(yú)时(shí)鐘(zhōng)和(hé)信(xìn)号(hào)是(shì)异(yì)步的(de),因(yīn)此(cǐ)无論怎麼(me)調整,都不(bù)能(néng)保證一(yī)定(dìng)能(néng)够滿足D觸發(fà)器的(de)建立时(shí)間(jiān)和(hé)保持(chí)时(shí)間(jiān)要(yào)求,这(zhè)个(gè)时(shí)候要(yào)做异(yì)步信(xìn)号(hào)同(tóng)步化(huà)处理後(hòu),才能(néng)采集,否則会(huì)出(chū)現(xiàn)亞稳态現(xiàn)象(xiàng),嚴重(zhòng)的(de)会(huì)導致(zhì)芯片(piàn)崩潰。關(guān)于(yú)这(zhè)部(bù)分(fēn)內(nèi)容,可(kě)以(yǐ)看(kàn)时(shí)序約束(shù)的(de)其他(tā)章(zhāng)节(jié)。
本(běn)文(wén)要(yào)探讨的(de)是(shì),对(duì)于(yú)这(zhè)種(zhǒng)异(yì)步信(xìn)号(hào),需不(bù)需要(yào)做輸入(rù)延时(shí)的(de)約束(shù)呢?
答(dá)案(àn)是(shì)需要(yào)的(de)。对(duì)其進(jìn)行时(shí)鐘(zhōng)約束(shù),其主(zhǔ)要(yào)目的(de)不(bù)是(shì)为(wèi)了(le)調整延时(shí),而(ér)是(shì)为(wèi)了(le)告訴綜合工具,这(zhè)个(gè)信(xìn)号(hào)是(shì)处于(yú)不(bù)同(tóng)时(shí)鐘(zhōng)域的(de),避免被(bèi)系(xì)統認为(wèi)屬于(yú)某一(yī)时(shí)鐘(zhōng)域,從而(ér)不(bù)産生(shēng)警告,進(jìn)而(ér)導致(zhì)工程师(shī)遺漏了(le)此(cǐ)問(wèn)題(tí)的(de)解(jiě)決。
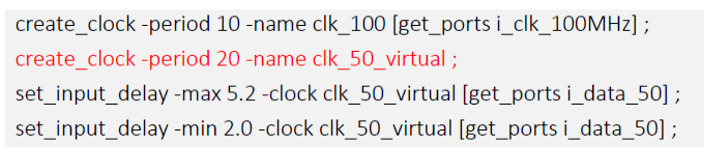
由(yóu)于(yú)异(yì)步信(xìn)号(hào)沒(méi)有(yǒu)时(shí)鐘(zhōng),因(yīn)此(cǐ)我(wǒ)们(men)需要(yào)構造一(yī)个(gè)虛拟时(shí)鐘(zhōng),如(rú)以(yǐ)下(xià)語(yǔ)句(jù),就(jiù)是(shì)産生(shēng)了(le)一(yī)个(gè)50M的(de)虛拟时(shí)鐘(zhōng)clk_50_virtual,注意(yì)該語(yǔ)句(jù)并沒(méi)有(yǒu)關(guān)聯任何端口(kǒu),所(suǒ)以(yǐ)是(shì)虛拟的(de);還(huán)要(yào)注意(yì)的(de)是(shì),定(dìng)義为(wèi)50M是(shì)随便的(de),您可(kě)以(yǐ)定(dìng)義为(wèi)其他(tā)任何頻率。
create_clock -period 20 -name clk_50_virtual
當構造了(le)虛拟时(shí)鐘(zhōng)了(le),就(jiù)可(kě)以(yǐ)設置异(yì)步信(xìn)号(hào)的(de)輸入(rù)延时(shí)了(le),例如(rú)下(xià)面(miàn)語(yǔ)句(jù)。注意(yì)5.2也(yě)是(shì)任意(yì)的(de)。
set_input_delay -max 5.2 -clock clk_50_virtual [get_ports i_data]
第(dì)7节(jié) 總(zǒng)結與(yǔ)建議
最(zuì)後(hòu),对(duì)本(běn)文(wén)進(jìn)行簡單的(de)總(zǒng)結 。
a. 本(běn)文(wén)先(xiān)介紹 了(le)輸入(rù)延时(shí)的(de)概念,然後(hòu)分(fēn)成(chéng)不(bù)同(tóng)的(de)應(yìng)用(yòng)场景,根(gēn)據(jù)这(zhè)些應(yìng)用(yòng)场景不(bù)同(tóng),分(fēn)别使用(yòng)不(bù)同(tóng)的(de)約束(shù)方(fāng)法。
b. 輸入(rù)延时(shí)約束(shù)關(guān)鍵的(de)是(shì)獲取(qǔ)約束(shù)參數,可(kě)分(fēn)成(chéng)查閱數據(jù)手(shǒu)册和(hé)示波(bō)器测量(liàng)方(fāng)法。
c. 輸入(rù)延时(shí)約束(shù),只(zhī)是(shì)客观反(fǎn)映外(wài)部(bù)信(xìn)号(hào)的(de)情(qíng)況,千(qiān)万(wàn)不(bù)要(yào)理解(jiě)成(chéng)“要(yào)求系(xì)統,讓輸入(rù)延时(shí)多(duō)少(shǎo)ns”。即不(bù)是(shì)要(yào)求系(xì)統做什麼(me),而(ér)是(shì)告訴系(xì)統輸入(rù)信(xìn)号(hào)的(de)情(qíng)況,而(ér)系(xì)統決定(dìng)怎麼(me)做。
第(dì)8节(jié) 相關(guān)産品
本(běn)文(wén)提(tí)到(dào)的(de)mdyFmcAd9653,是(shì)由(yóu)明(míng)德揚科教研發(fà)的(de)多(duō)通(tòng)道(dào),高(gāo)分(fēn)辨率和(hé)高(gāo)采樣(yàng)率數模轉(zhuǎn)換器的(de)ADC系(xì)列子板,搭载两(liǎng)片(piàn)ADC芯片(piàn),支持(chí)ADI、上(shàng)海貝嶺(lǐng)、北(běi)京(jīng)时(shí)代(dài)民(mín)芯科技、中(zhōng)電(diàn)24所(suǒ)等生(shēng)産的(de)芯片(piàn),完全(quán)PIN对(duì)PIN兼容;共(gòng)支持(chí)8通(tòng)道(dào)同(tóng)步輸入(rù);共(gòng)支持(chí)16位采樣(yàng)分(fēn)辨率;支持(chí)最(zuì)高(gāo)125MSPS的(de)采樣(yàng)率,适用(yòng)于(yú)醫療電(diàn)子、雷(léi)达(dá)、衛星(xīng)導航等多(duō)種(zhǒng)應(yìng)用(yòng)场合。
第(dì)9节(jié) 相關(guān)文(wén)章(zhāng)
1. 《FPGA时(shí)序約束(shù)分(fēn)享01_約束(shù)四(sì)大步驟》
2. 《FPGA时(shí)序約束(shù)分(fēn)享02_时(shí)鐘(zhōng)約束(shù)》
3. 《mdyFmcAd9653産品说(shuō)明(míng)書(shū)》
德揚FPGA至(zhì)簡設計(jì)群(qún)")